Ювелирное обозрение
Все о ювелирных украшениях, драгоценных камнях и металлах
Как регулировать обороты электродвигателя постоянного тока
Содержание
Угловая скорость вращения двигателя постоянного тока определяется по формуле
 . (4.5)
. (4.5)
Очевидно, что регулировать ее можно тремя способами:
Включением добавочного резистора или реостата Rд в цепь обмотки якоря.
Изменением основного магнитного потока машины.
Изменением питающего напряжения.
Рассмотрим данные способы на примере двигателя параллельного возбуждения.
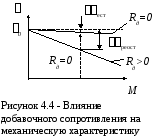 Дополнительное сопротивление Rд включают в цепь якоря аналогично пусковому реостату, однако в отличие от последнего оно должно быть рассчитано на продолжительное протекание тока. При включении реостата в цепь якоря скорость вращения с ростом нагрузки уменьшается более резко, чем при работе двигателя без реостата. Это видно из механических характеристик Рисунок4.4. Угловая скорость вращения холостого хода одинакова для естественной и искусственной характеристик. А значения ест и реост (уменьшение угловой скорости вращения при нагрузке) различны. При одном и том же моменте
Дополнительное сопротивление Rд включают в цепь якоря аналогично пусковому реостату, однако в отличие от последнего оно должно быть рассчитано на продолжительное протекание тока. При включении реостата в цепь якоря скорость вращения с ростом нагрузки уменьшается более резко, чем при работе двигателя без реостата. Это видно из механических характеристик Рисунок4.4. Угловая скорость вращения холостого хода одинакова для естественной и искусственной характеристик. А значения ест и реост (уменьшение угловой скорости вращения при нагрузке) различны. При одном и том же моменте
 . (4.6.)
. (4.6.)
Чем больше Rд , тем круче с увеличением нагрузки падает скорость вращения.
Основной недостаток такого метода большие потери энергии в реостате (особенно на малых скоростях вращения). Очевидно, что данный способ позволяет только уменьшать скорость вращения по сравнению со скоростью на естественной характеристике.
Для того, чтобы изменить основной поток машины, необходимо регулировать ток возбуждения, для чего в цепь обмотки возбуждения включают регулировочный реостат.
Для магнитных потоков Ф1 и Ф2 скорость вращения будет определяться соответственно выражениями
 . (4.7)
. (4.7)
 . (4.8)
. (4.8)
В двигателе с параллельным возбуждением, например, отношения скоростей холостого хода и изменения скоростей вращения при управлении со стороны обмотки возбуждения, обратно пропорциональны изменению магнитного потока:
 . (4.9)
. (4.9)
Электромеханические характеристики для двух значений потоков приведены на Рисунок 4.5.
В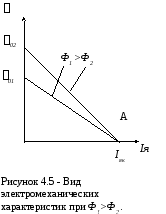 идно, что скоростные характеристики двигателя приФ1>Ф2 не являются параллельными, они пересекаются в точке А (при нулевой скорости вращения. Это объясняется тем, что ток якоря короткого замыкания Iяк не зависит от величины потока, а определяется величинами напряжения и сопротивления цепи якоря (Iяк=U/Rя).
идно, что скоростные характеристики двигателя приФ1>Ф2 не являются параллельными, они пересекаются в точке А (при нулевой скорости вращения. Это объясняется тем, что ток якоря короткого замыкания Iяк не зависит от величины потока, а определяется величинами напряжения и сопротивления цепи якоря (Iяк=U/Rя).
Величина же момента изменяется прямопропорционально величине потока, тогда для момента короткого замыкания будет справедливо соотношение
 . (4.10)
. (4.10)
М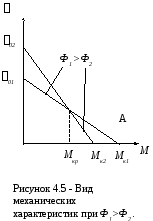 еханические характеристики при Ф1>Ф2 (рисунок 4.6) будут пересекаться при некотором значении критического момента М . Таким образом, с уменьшением магнитного потока угловая скорость вращения холостого хода возрастает, а величина момента короткого замыкания снижается. Тогда, при значениях нагрузочного момента, меньших Мкр уменьшение потока приводит к увеличению скорости вращения, а при значениях больших Мкр, наоборот – к ее снижению.
еханические характеристики при Ф1>Ф2 (рисунок 4.6) будут пересекаться при некотором значении критического момента М . Таким образом, с уменьшением магнитного потока угловая скорость вращения холостого хода возрастает, а величина момента короткого замыкания снижается. Тогда, при значениях нагрузочного момента, меньших Мкр уменьшение потока приводит к увеличению скорости вращения, а при значениях больших Мкр, наоборот – к ее снижению.
В двигателях параллельного возбуждения средней и большой мощности уменьшение потока используют для повышения скорости вращения, а в микродвигателях поток уменьшают для снижения скорости вращения.
Данный способ прост и экономичен, поэтому широко применяется на практике. К его недостаткам следует отнести сравнительно небольшой диапазон регулирования скорости т.е.
 , (4.11)
, (4.11)
где min -минимальная угловая скорость ограничивается насыщением магнитной цепи машины (рост магнитного потока ограничен);
max-максимальная угловая скорость ограничивается механической устойчивостью двигателя, а также тем, что при глубоком ослаблении возбуждения резко увеличивается искажающее действие реакции якоря и растет реактивная ЭДС, что повышает опасность возникновения искрения на коллекторе и появления кругового огня.
Регулирование скорости вращения двигателя изменением управляющего напряжения применяется лишь при  Iв=const, т.е. при раздельном питании цепей обмотки якоря и обмотки возбуждения при независимом возбуждении.
Iв=const, т.е. при раздельном питании цепей обмотки якоря и обмотки возбуждения при независимом возбуждении.
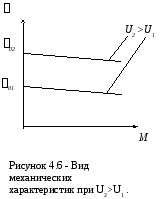 Угловая скорость вращения холостого хода пропорциональна напряжению (ω=U/cеФ), а изменение скорости (Δω=Iя Rя/сеФ) от напряжения не зависит. Поэтому механические характеристики двигателя при изменении напряжения Рисунок4.6. не меняют угла наклона к оси абсцисс, а смещаются по высоте, оставаясь параллельными друг другу. Изменением напряжения управления цепи якоря можно регулировать скорость вращения вниз от номинальной, поскольку недопустима подача напряжения выше номинального значения. При необходимости увеличения скорости вращения выше н
Угловая скорость вращения холостого хода пропорциональна напряжению (ω=U/cеФ), а изменение скорости (Δω=Iя Rя/сеФ) от напряжения не зависит. Поэтому механические характеристики двигателя при изменении напряжения Рисунок4.6. не меняют угла наклона к оси абсцисс, а смещаются по высоте, оставаясь параллельными друг другу. Изменением напряжения управления цепи якоря можно регулировать скорость вращения вниз от номинальной, поскольку недопустима подача напряжения выше номинального значения. При необходимости увеличения скорости вращения выше н оминальной, можно воспользоваться изменением тока возбуждения двигателя.
оминальной, можно воспользоваться изменением тока возбуждения двигателя.
Практическая реализация данного способа регулирования скорости сводится к применению регулируемого источника напряжения. Например, для управления двигателями малой и средней мощности в качестве такого источника можно применять регулируемый выпрямитель Рисунок4.7, в котором напряжение постоянного тока меняется регулировочным автотрансформатором(АТ), включенным на входе выпрямителя.
Изменение направления вращения
Для того чтобы изменить направление вращения (выполнить реверс) нужно поменять знак электромагнитного момента на противоположный. Это возможно осуществить двумя способами:
Изменением направления тока якоря.
Изменением направления магнитного потока, т.е. тока возбуждения.
Практически это делается изменением полярности напряжения, подаваемого на обмотки.

Электропривод, построенный на основе двигателей постоянного тока используются в металлургической, машиностроительной, химической, угольной, деревообрабатывающей и других отраслях промышленности.
Применение электропривода способствует созданию промышленного оборудования, в том числе станков с высокой степенью автоматизации. При этом в автоматизированном электроприводе главное место занимает такая задача, как регулирование скорости вращения двигателей постоянного тока.
Основные способы управления скоростью вращения двигателя постоянного тока:
1) изменение тока в цепи обмотки возбуждения при стабильном напряжении на обмотке якоря;
2) изменение напряжения на обмотке якоря при стабильном токе в цепи обмотки возбуждения;
3) изменение напряжения на обмотке якоря, а также изменение тока в цепи обмотки возбуждения.
Для изменения величин напряжения на обмотке якоря или силы тока в цепи обмотки возбуждения применяются чаще всего управляемые выпрямители. Для работы в промышленном оборудовании используются однофазные и трехфазные выпрямители, собранные по мостовой схеме. При этом конструктивное исполнение двигателей постоянного тока способствует тому, что необходимая мощность выпрямителей для цепи обмотки возбуждения намного меньше мощности выпрямителя для обмотки якоря. Однако, существуют также и недостатки регулирования частоты вращения двигателя изменением силы тока в цепи обмотки возбуждения. Основным недостатком является уменьшение быстродействия исполнения задаваемой скорости, другими словами, худшие динамические свойства автоматизированого электропривода. Для некоторых применений эти показатели являются не критичными, поэтому при проектировании следует руководствоваться требованиями к приводу в соответствии с техническим заданием.
Если технологический процесс включает необходимость изменения направления вращения двигателя(реверс), эта возможность также может быть выполнена одним из способов – в цепи обмотки якоря или обмотки возбуждения. Такая возможность реализуется изменением полярности управляющего постоянного напряжения или тока.
Узнайте условия проведения наладки промышленной электроники, отправив запрос на [email protected]
Время выполнения запроса: 0,00257205963135 секунд.

Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки – рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.


Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя – разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 – скорость вращения магнитного поля
n2 – скорость вращения ротора
При этом обязательно выделяется энергия скольжения – из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз – то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор – это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
![]()
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
 Преимущества данной схемы:
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
 Недостатки:
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
![]()
![]()
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи – два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.

Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно "отрезается" кусок вначале или, реже в конце волны напряжения.

Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки – ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования – пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно – шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения – для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением


Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель – электронный автотрансформатор или ШИМ-регулятор.
![]()
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы – полевые или биполярные с изолированным затвором (IGBT).
![]()
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.

Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы – диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина – не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие – массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование – основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей – INVERTEK DRIVES.
Это модель Optidrive E2

Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f – частота тока
С – ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:

Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя – в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
Использование ЧП для трёхфазных двигателей

Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:

Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:

Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого – магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями