Ювелирное обозрение
Все о ювелирных украшениях, драгоценных камнях и металлах
Как сделать робота паука в домашних условиях
Содержание
- 0.1 Иван Мин
- 0.2 Искусство цифрового прототипирования сегодня как никогда доступно. Если раньше цикл от идеи до первой модели занимал несколько месяцев, то сейчас программное обеспечение позволяет сократить процесс до одного дня. Как нарисовать скетч с использованием графического планшета, создать цифровой прототип в программе 3D-моделирования, проанализировть прочность конструкции и напечатать результат на 3D-принтере — T&P публикуют подробную инструкцию, составленную с помощью экспертов Autodesk.
- 1 Сначала была паранойя
- 2 Важно! О мелких деталях
- 3 Процесс сборки
- 4 Как стать душой компании при помощи робота
- 5 Troubleshooting
- 6 Что можно воспитать благодаря данному набору?
- 7 Итоги
- 8 Шаг 1: Запчасти
- 9 Шаг 2: Постройте переднюю левую лапу
- 10 Шаг 3: Постройте переднюю правую лапу
- 11 Шаг 4: Завершение сборки лап
- 12 Шаг 5: Прикрепление лап к туловищу
Иван Мин
Искусство цифрового прототипирования сегодня как никогда доступно. Если раньше цикл от идеи до первой модели занимал несколько месяцев, то сейчас программное обеспечение позволяет сократить процесс до одного дня. Как нарисовать скетч с использованием графического планшета, создать цифровой прототип в программе 3D-моделирования, проанализировть прочность конструкции и напечатать результат на 3D-принтере — T&P публикуют подробную инструкцию, составленную с помощью экспертов Autodesk.
Современные технологии открывают перед конструкторами и инженерами удивительные возможности. В качестве одного из примеров можно привести технологию цифрового прототипирования — создание цифрового макета изделия, используемого для испытания его функций и формы, выявления каких-либо недостатков и проведения оптимизации. В этой модели заключено большое количество данных, касающихся концептуальной, механической, электрической составляющей продукта и т.д. Более того, все эти данные взаимосвязаны между собой — изменение какой-либо составляющей влечет за собой автоматическое изменение остальных частей цифрового прототипа. Все это позволяет ускорить сроки разработки изделия, сам процесс проектирования становится более удобным.
Чтобы немного прояснить картину, давайте рассмотрим небольшой пример создания проекта с применением программных средств, базирующихся на концепции цифрового прототипа. Предположим, нам необходимо разработать робота-паука, задачей которого является исследование окружающей местности: т.е. он должен уметь самостоятельно перемещаться, преодолевать препятствие, а также нести на себе устройство записи (видеокамеру). Всего за восемь часов мы сделаем эскиз, построим модель, сделаем динамическое моделирование и инженерный анализ, уделим внимание проводам, кабелям и визуализации.

Наш процесс начинается с этапа создания эскиза, на базе которого в дальнейшем будет проводиться построение 3D-модели. Здесь мы определили, как будет выглядеть наш робот: у него есть голова, 6 ног, снизу крепится камера и т.д. Для создания эскиза использовался SketchBook — довольно удобный инструмент для рисования как растровой, так и векторной графики, позиционирующийся как раз как средство для разработки концепции изделий. Его основное преимущество заключается в удобных инструментах «линейки» и «транспортира», с помощью которых становится очень удобно рисовать инженерные эскизы, изобилующие прямыми и строгими линиями. То есть вам даже не обязательно иметь планшет, вы можете нарисовать то, что задумали, при помощи лишь одной мыши (хотя, конечно, об удобстве в данном случае придется забыть).

Далее, на основе выполненных эскизов можно приступать к созданию 3D-модели нашего изделия — в некотором роде «скелета» нашего цифрового прототипа, на базе которого будут в дальнейшем проводиться расчеты и оптимизация конструкции, создание технической документации, визуализация и т.д. Модели составных деталей мы выполнили в Inventor, используя твердотельное моделирование. Можно сказать, что построение той или иной детали начинается с рисования ее проекции (эскиза), с которой потом можно выполнить ряд определенных операций, к примеру «выдавить» (если у нас на эскизе был прямоугольник, то в итоге этой операции мы получим параллелепипед) или «повращать» относительно какой-либо оси (выполнив вращение «дольки» относительно соответствующей прямой, получим сферу). На этом список операций с эскизами, естественно, не заканчивается. Таким образом, мы получили три уникальные (неповторяющиеся) детали нашего робота: голова и две части ноги. В среде «Сборка» эти части были соединены воедино, а ноги паука размножены массивом до 6 штук. У человека с опытом работы в 3D-САПР данный этап каких-либо сложностей не вызовет, тем более, что в процессе работы не пришлось сталкиваться с построением каких-либо сложных элементов или с поверхностным моделированием. В итоге мы получили подвижную модель нашего робота, благодаря которой мы можем посмотреть, как будет осуществляться движение нашего робота, не задевают ли детали друг о друга и т.д.


Первое, что бросается в глаза — такой робот не сможет ходить. Просто для того, чтобы переместить его конечность, необходимы как минимум две детали, а не одна. Первая деталь должна поднимать ногу, а вторая — вращать. Возможно немного притянутый, но в то же время яркий пример того, как цифровое прототипирование позволяет избежать возможных ошибок при проектировании изделия. Тем не менее, целью данной инструкции не является попытка представить рабочий продукт, который уже завтра можно отправлять в производство. Скорее, хотелось бы осветить саму концепцию и некоторые возможности цифрового прототипирования, так что на перечисленных выше конструктивных особенностях мы заострять внимание не будем, а перейдем к следующему этапу.

Этот этап является по сути подготовительным перед анализом. С механической точки зрения наш робот — совокупность механизмов различных типов, взаимодействующих между собой. И для того, чтобы определить стабильность их работы и провести последующую модернизацию конструкции, необходимо провести кинематический и динамический анализ механизмов. В данном случае мы рассмотрели циклический процесс подъема и опускания одной из ног робота. По заданным изначальным характеристикам (изменениям координат, скорости и действующей на механизм силы) с помощью модуля «Динамическое моделирование» можно получить интересующие нас параметры, увидеть, как они меняются во времени. В частности, возникающее в кинематической паре усилие. Основная сложность, которая возникает на данном этапе, — это переход от реальной модели к расчетной: необходимо правильно подобрать и настроить модель в программе, чтобы она как можно ближе соответствовала тому, что происходит с конструкцией в реальной среде. Все сводится к тому, чтобы провести ряд приближений и упрощений задачи, задать вид соединения элементов, правильно указать действующие силы и т.д.

Полученные на предыдущем этапе данные потребуются нам для проведения прочностного расчета, на основании которого можно определить, каким образом можно улучшить нашу конструкцию. К примеру, мы хотим повысить эффективность робота за счет уменьшения его веса. Чем легче его составляющие, тем меньше необходимо затратить энергии на выполнение того или иного действия. Убрать часть материала можно, естественно, до определенной меры — конечности нашего робота должны оставаться достаточно прочными, чтобы выполнять поставленные изначально задачи. К примеру, можно вырезать окно в нашей детали и укрепить ее затем пересекающимися балками. А определить оптимальные размеры этих конструктивных элементов как раз помогают расчетные системы автоматизированного проектирования, в частности Autodesk Simulation. Расчетные САПР основываются на решении огромных матриц, базирующихся на модели и уравнениях, характерных для той или иной области (если мы имеем дело с задачей прочности — закон Гука, если же это гидрогазодинамика — уравнения Навье-Стокса и т.д.). На основании нескольких проведенных расчетов была предложена конструкция, представленная ниже. Как можно заметить, наш робот стал не только легче, но и красивее!



И это только один из примеров возможной оптимизации. Здесь все ограничивается вашим инженерным опытом, чутьем и воображением. Внесенные в геометрию детали изменения автоматически заносятся и в модель, и в чертежи, созданные на ее основании. Это очень удобно, и обычно не требуется никакого вмешательства со стороны пользователя в данный процесс.
Что касается сложностей, которые могут возникнуть на данном этапе, то они во многом схожи с динамическим моделированием: это переход от реальной задачи к расчетной модели. Необходимо обладать определенным опытом, чтобы понять, как правильно задать граничные условия, какие принять допущения в задаче и т.д.
Одним из заключительных этапов построения цифрового прототипа является работа с проводами в среде Inventor «Провода и кабели». Здесь мы создаем электрические компоненты, соединяем их между собой, настраиваем их параметры и осуществляем прокладку кабельной трассы. В результате мы получаем трехмерную монтажную схему, рассчитанные диаметры кабелей и длины проводов, а также ассоциативную документацию (таблицы длин проводов, таблицы подключений, перечни элементов и кабельных трасс).
Заключительным этапом построения нашего цифрового прототипа является визуализация проекта. Здесь все относительно просто: экспортируем нашу модель в , указываем пару настроек и ждем полчаса, пока будет готово наше красивое изображение.
Примерно таким вот образом происходит создание цифрового прототипа. В зависимости от сложности разрабатываемого продукта, описанная выше схема может расширяться за счет дополнительных этапов, например, создания чертежной документации или оптимизации модели под 3D-печать.
Возможно, у читателя может возникнуть вопрос: разве концепция цифрового прототипа не была известна до этого? Ведь подобные САПР, способные справиться с вышеперечисленными задачами, существуют уже не один десяток лет. Так и есть, но далеко не многие программы способны хорошо обмениваться между собой информацией и адаптивно подстраиваться под ее изменение. То есть они обеспечивали только часть функциональных возможностей, необходимых для создания полного цифрового прототипа. Сейчас же эта технология стремительно развивается, что можно заметить на выпускаемой продукции многих программных вендоров, в частности Autodesk. Мы очень коротко рассмотрели небольшой пример демонстрационной работы, которая была выполнена буквально за пару часов. Конечно, более детальные и серьезные проекты требуют гораздо больше времени, но, тем не менее, на основании вышеизложенной информации можно сделать вывод, что использование цифрового прототипирования позволит сэкономить значительную часть времени, ресурсов и сил.
Сейчас уже мало кто помнит, к сожалению, что в 2005 году были Chemical Brothers и у них был замечательный клип — Believe, где роботизированная рука гонялась по городу за героем видео.
Тогда у меня появилась мечта. Несбыточная на тот момент, т. к. ни малейшего понятия об электронике у меня не было. Но мне хотелось верить — believe. Прошло 10 лет, и буквально вчера мне удалось впервые собрать своего собственного робота-манипулятора, запустить его в работу, затем сломать, починить, и снова запустить в работу, а попутно найти друзей и обрести уверенность в собственных силах.
Внимание, под катом спойлеры!
Всё началось с этого набора (привет, Мастер Кит, и спасибо, что разрешили написать в вашем блоге!), который был почти сразу найден и выбран после этой статьи на Хабре. На сайте говорится, что собрать робота — под силу даже 8-летнему ребёнку — чем я хуже? Я точно так же только пробую свои силы.
Сначала была паранойя
Как истинный параноик, сразу выскажу опасения, которые у меня изначально были относительно конструктора. В моём детстве сперва были добротные советские конструкторы, потом рассыпающиеся в руках китайские игрушки… а потом детство кончилось:(
Поэтому из того, что осталось в памяти об игрушках, было:
- Пластмасса будет ломаться и крошиться в руках?
- Детали будут неплотно подходить друг к другу?
- В наборе будут не все детали?
- Собранная конструкция будет непрочной и недолговечной?
И, наконец, урок, который был вынесен из советских конструкторов:
- Часть деталей придётся допиливать напильником
- А части деталей просто не будет в наборе
- И ещё часть будет изначально не работать, её придётся менять
Что я могу сказать сейчас: не зря в моем любимом клипе Believe главный герой видит страхи там, где их нет. Ни одно из опасений не оправдалось: деталей было ровно столько, сколько нужно, все они подходили друг к другу, на мой взгляд — идеально, что очень сильно поднимало настроение по ходу работы.
Детали конструктора не только отлично подходят друг к другу, но также продуман тот момент, что детали почти что невозможно перепутать. Правда, с немецкой педантичностью создатели отложили винтиков ровно столько сколько нужно, поэтому терять винтики по полу или путать «какой куда» при сборке робота нежелательно.
Длина: 228 мм
Высота: 380 мм
Ширина: 160 мм
Вес в сборке: 658 гр.
Питание: 4 батарейки типа D
Вес поднимаемых предметов: до 100 гр
Подсветка: 1 светодиод
Тип управления: проводной дистанционный пульт
Примерное время сборки: 6 часов
Движение: 5 коллекторных моторов
Защита конструкции при движении: храповик
Подвижность:
Механизм захвата: 0-1,77”
Движение запястья: в пределах 120 градусов
Движение локтя: в пределах 300 градусов
Движение плеча: в пределах 180 градусов
Вращение на платформе: в пределах 270 градусов
Вам понадобятся:
- удлинённые плоскогубцы (не получится обойтись без них)
- боковые кусачки (можно заменить на нож для бумаги, ножницы)
- крестовая отвёртка
- 4 батарейки типа D
Важно! О мелких деталях
Кстати о «винтиках». Если вы сталкивались с подобной проблемой, и знаете, как сделать сборку ещё удобнее — добро пожаловать в комментарии. Пока что поделюсь своим опытом.
Одинаковые по функции, но разные по длине болты и шурупы достаточно чётко прописаны в инструкции, например, на средней фото внизу мы видим болты P11 и P13. А может P14 — ну, то есть, вот опять, я снова их путаю. =)
Различить их можно: в инструкции прописано, какой из них сколько миллиметров. Но, во-первых, не будешь же сидеть со штангенциркулем (особенно если тебе 8 лет иили у тебя его попросту нет), а, во-вторых, различить их в итоге можно только, если положить рядом, что может не сразу прийти на ум (мне не пришло, хе-хе).
Поэтому заранее предупрежу, если надумаете собирать этого или похожего робота сами, вот вам подсказка:
- либо заранее присмотритесь к крепёжным элементам;
- либо купите себе побольше мелких винтов, саморезов и болтов, чтобы не париться.
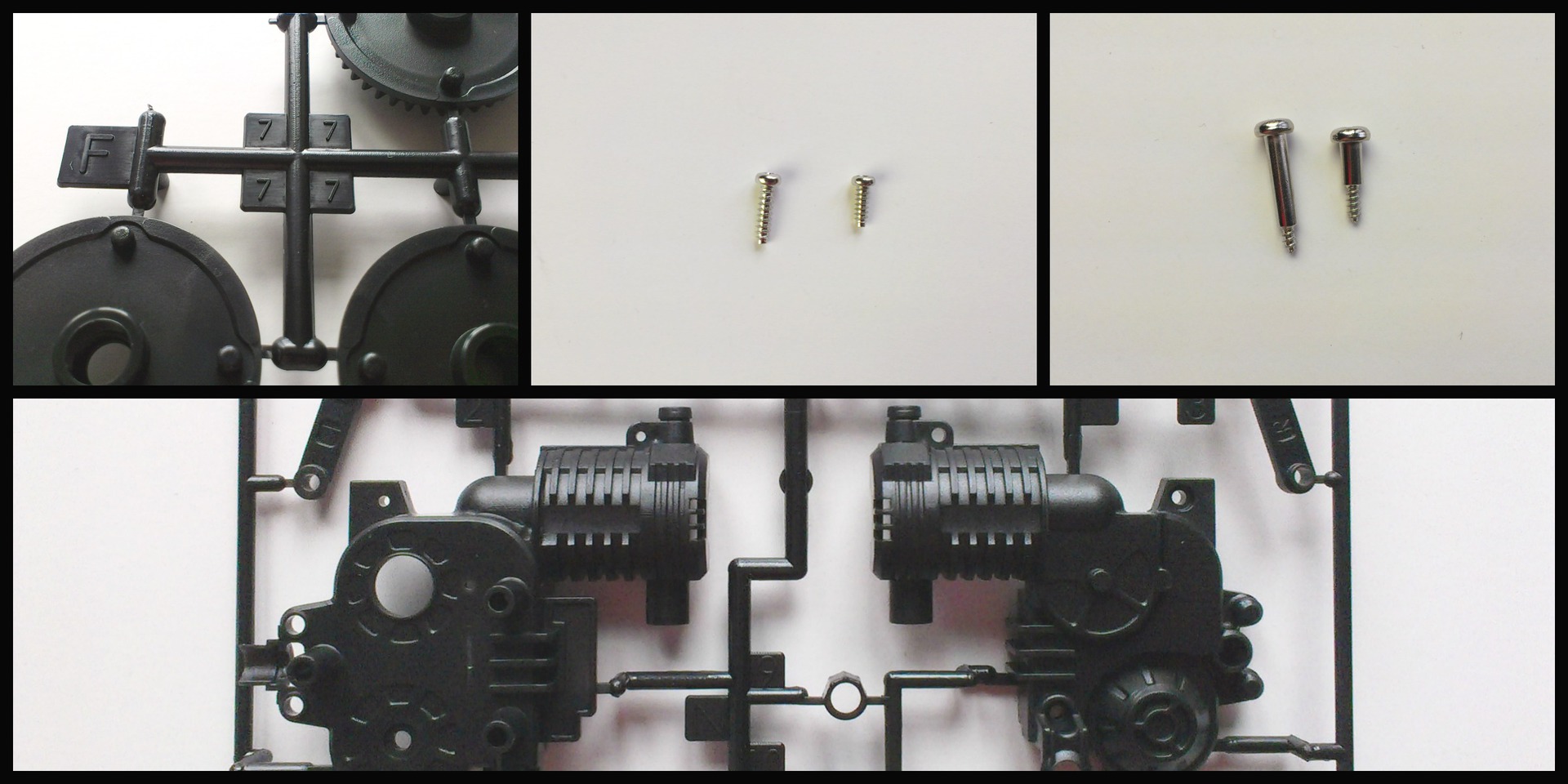
Также, ни в коем случае не выбрасывайте ничего, пока не закончите сборку. На нижней фотографии в середине, между двумя деталями от корпуса «головы» робота — небольшое кольцо, которое чуть не полетело в мусор вместе с прочими «обрезками». А это, между прочим, держатель для светодиодного фонарика в «голове» механизма захвата.
Процесс сборки
К роботу прилагается инструкция без лишних слов — только изображения и чётко каталогизированные и промаркированные детали.
Детали достаточно удобно откусываются и зачистки не требуют, но мне понравилась идея каждую деталь обработать ножом для картона и ножницами, хотя это и не обязательно.
Сборка начинается с четырёх из пяти входящих в конструкцию моторов, собирать которые настоящее удовольствие: я просто обожаю шестерёночные механизмы.
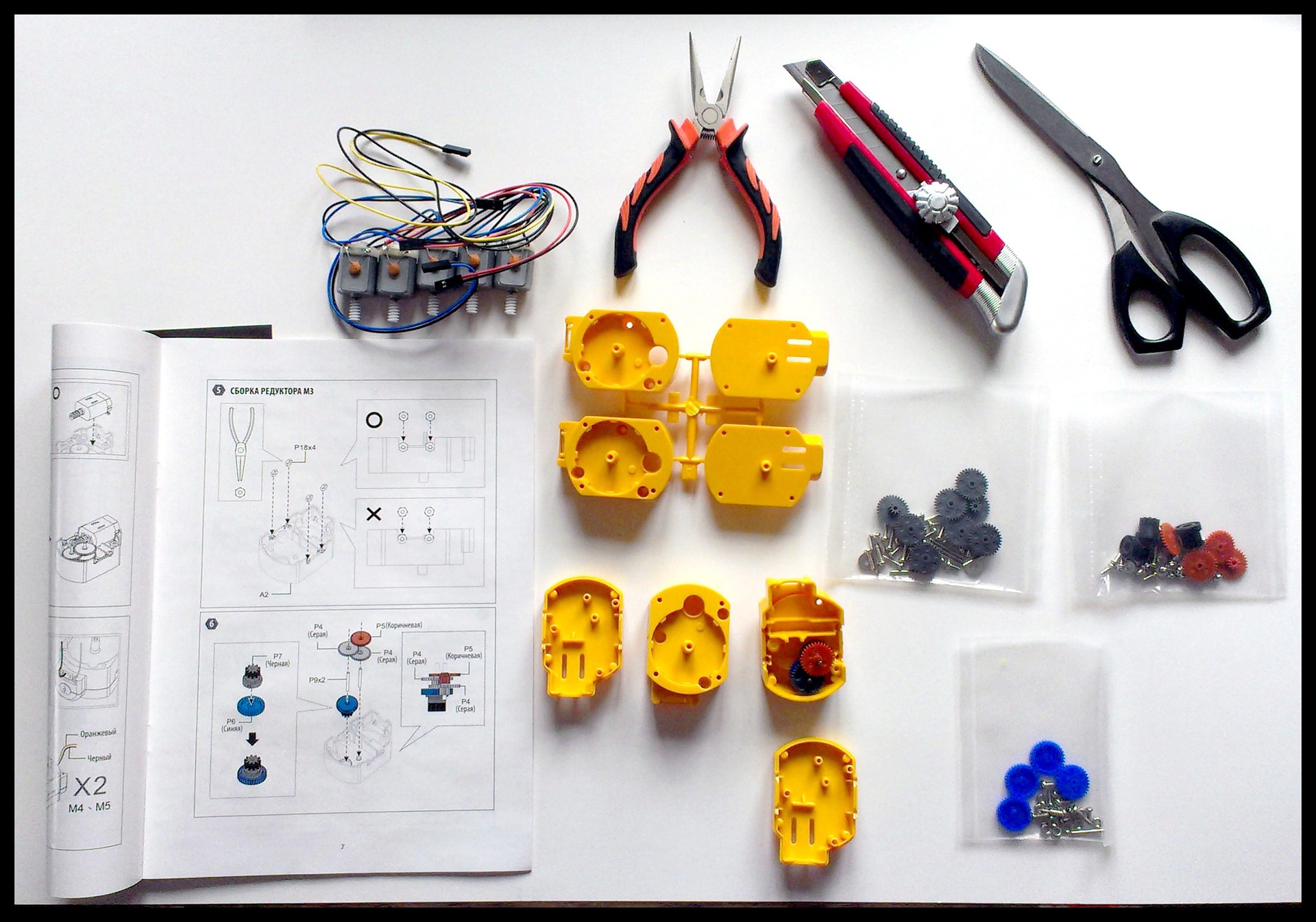
Моторчики мы обнаружили аккуратно упакованными и «прилипшими» друг к другу — готовьтесь ответить на вопрос ребёнка, почему коллекторные моторчики магнитятся (можно сразу в комментариях! 🙂
Важно: в 3 из 5 корпусов моторчиков нужно утопить гайки по бокам — на них в дальнейшем мы посадим корпуса при сборке руки. Боковые гайки не нужны только в моторчике, который пойдёт в основу платформы, но чтобы потом не вспоминать, какой корпус куда, лучше утопите гайки в каждом из четырёх жёлтых корпусов сразу. Только для этой операции будут нужны плоскогубцы, в дальнейшем они не понадобятся.

Примерно через 30-40 минут каждый из 4х моторов оказался снабжён своим шестереночным механизмом и корпусом. Собирается всё не сложнее, чем в детстве собирался «Киндер-сюрприз», только гораздо интереснее. Вопрос на внимательность по фото выше: три из четырёх выходных шестерёнок черные, а где белая? Из её корпуса должны выходить синий и чёрный провод. В инструкции это всё есть, но, думаю, обратить на это внимание ещё раз стоит.
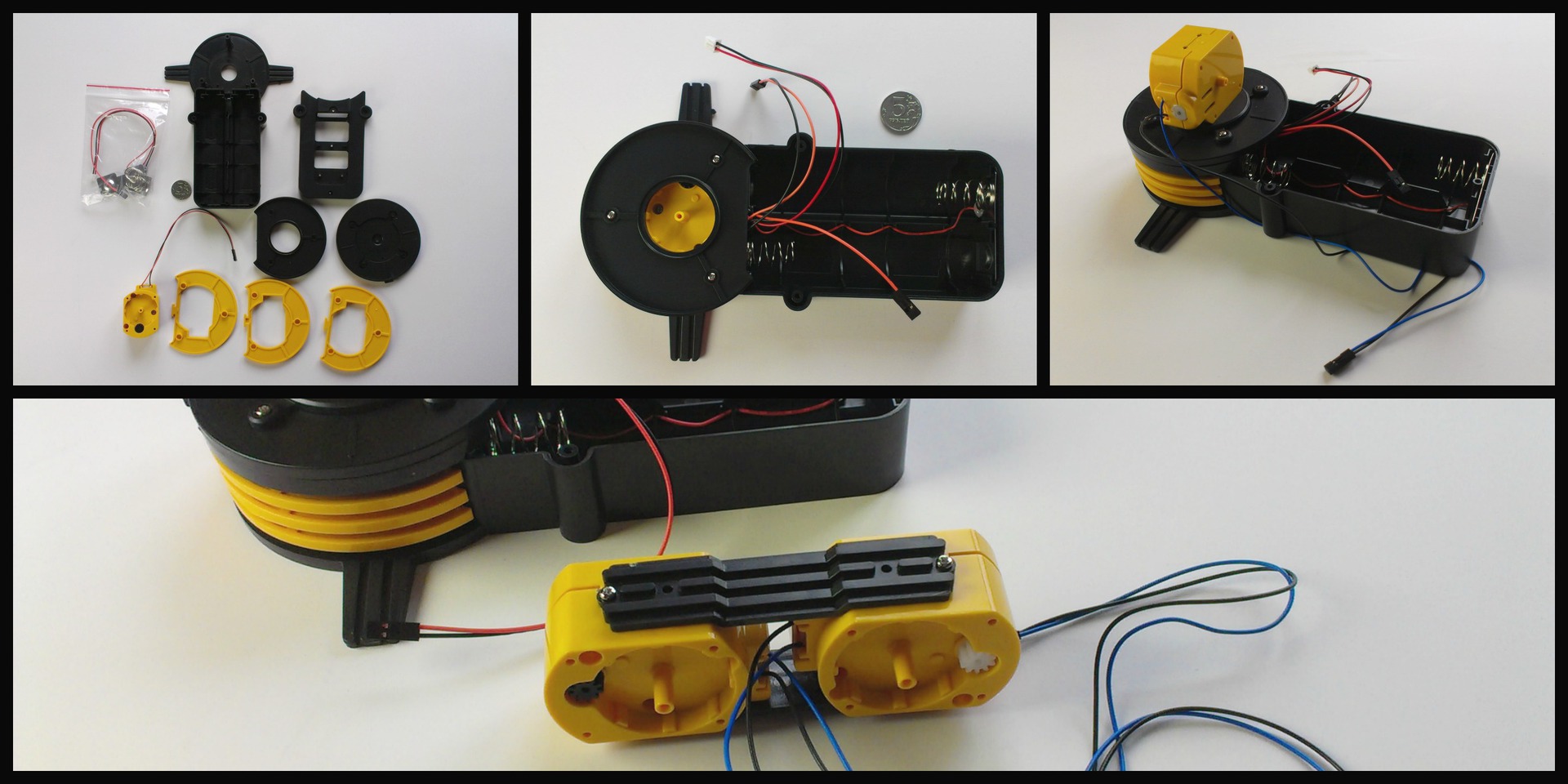
После того, как у вас на руках оказались все моторы, кроме «головного», вы приступите к сборке платформы, на которой будет стоять наш робот. Именно на этом этапе ко мне пришло понимание, что с шурупами и винтами надо было поступать более вдумчиво: как видно на фото выше, двух винтов для скрепления моторчиков вместе за счет боковых гаек мне не хватило — они уже были где-то мною же вкручены в глубине уже собранной платформы. Пришлось импровизировать.
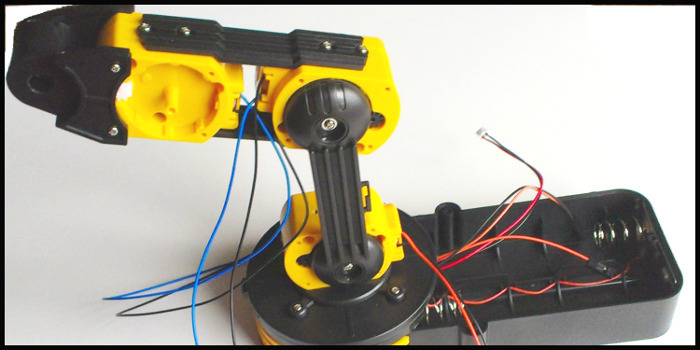
Когда платформа и основная часть руки собраны, инструкция предложит вам перейти к сбору механизма захвата, где полно мелких деталей и подвижных частей — самое интересное!

Но, надо сказать, что на этом спойлеры закончатся и начнутся видео, так как мне нужно было ехать на встречу с подругой и робота, которого не удалось успеть закончить, пришлось захватить с собой.
Как стать душой компании при помощи робота
Легко! Когда мы продолжили сборку вместе, стало понятно: собирать робота самостоятельно — очень приятно. Работать над конструкцией вместе — приятно вдвойне. Поэтому смело могу рекомендовать этот набор для тех, кто не хочет сидеть в кафе за скучными разговорами, но хочет повидаться с друзьями и хорошо провести время. Более того, мне кажется, и тимбилдинг с таким набором — например, сборка двумя командами, на скорость — практически беспроигрышный вариант.
Робот ожил в наших руках сразу, как только мы закончили сборку. Передать вам наш восторг, я, к сожалению, не могу словами, но, думаю, многие меня здесь поймут. Когда конструкция, которую ты сам собрал вдруг начинает жить полноценной жизнью — это кайф!
Мы поняли, что жутко проголодались и пошли поесть. Идти было недалеко, поэтому робота мы донесли в руках. И тут нас ждал ещё один приятный сюрприз: робототехника не только увлекательна. Она ещё и сближает. Как только мы сели за столик, нас окружили люди, которые хотели познакомиться с роботом и собрать себе такого же. Больше всего ребятам понравилось здороваться с роботом «за щупальца», потому что ведёт он себя действительно как живой, да и в первую очередь это же рука! Словом, основные принципы аниматроники были освоены пользователями интуитивно. Вот как это выглядело:
Troubleshooting
По возвращении домой меня ждал неприятный сюрприз, и хорошо, что он случился до публикации этого обзора, потому что теперь мы сразу обговорим troubleshooting.
Решив попробовать подвигать рукой по максимальной амплитуде, удалось добиться характерного треска и отказа функциональности механизма мотора в локте. Сначала это меня огорчило: ну вот, новая игрушка, только собрана — и уже больше не работает.
Но потом меня осенило: если ты сам её только что собрал, за чем же дело стало? =) Я же прекрасно знаю набор шестерёнок внутри корпуса, а чтобы понять, сломался ли сам мотор, или просто недостаточно хорошо был закреплён корпус, можно не вынимая моторчика из платы дать ему нагрузку и посмотреть, продолжатся ли щелчки.
Вот тут-то мне и удалось почувствовать себя настоящим робо-мастером!

Аккуратно разобрав «локтевой сустав», удалось определить, что без нагрузки моторчик работает бесперебойно. Разошёлся корпус, внутрь выпал один из шурупов (потому что его примагнитил моторчик), и если бы мы продолжили эксплуатацию, то шестерёнки были бы повреждены — в разобранном виде на них была обнаружена характерная «пудра» из стёршейся пластмассы.
Очень удобно, что робота не пришлось разбирать целиком. И классно на самом деле, что поломка произошла из-за не совсем аккуратной сборки в этом месте, а не из-за каких-то заводских трудностей: их в моём наборе вообще обнаружено не было.
Совет: первое время после сборки держите отвёртку и плоскогубцы под рукой — могут пригодиться.
Что можно воспитать благодаря данному набору?
Уверенность в себе!
Мало того, что у меня нашлись общие темы для общения с совершенно незнакомыми людьми, но мне также удалось самостоятельно не только собрать, но и починить игрушку! А значит, я могу не сомневаться: с моим роботом всегда всё будет ок. И это очень приятное чувство, когда речь идёт о любимых вещах.
Мы живём в мире, где мы страшно зависим от продавцов, поставщиков, сотрудников сервиса и наличия свободного времени и денег. Если ты почти ничего не умеешь делать, тебе за всё придётся платить, и скорее всего — переплачивать. Возможность починить игрушку самому, потому что ты знаешь, как у неё устроен каждый узел — это бесценно. Пусть у ребёнка такая уверенность в себе будет.
Итоги
Что понравилось:
- Собранный по инструкции робот не потребовал отладки, запустился сразу
- Детали почти невозможно перепутать
- Строгая каталогизация и наличие деталей
- Инструкция, которую не надо читать (только изображения)
- Отсутствие значимых люфтов и зазоров в конструкциях
- Лёгкость сборки
- Лёгкость профилактики и починки
- Last but not least: свою игрушку собираешь сам, за тебя не трудятся филиппинские дети
Что нужно ещё:
- Ещё крепёжных элементов, прозапас
- Детали и запчасти к нему, чтобы можно было заменить при необходимости
- Ещё роботов, разных и сложных
- Идеи, что можно улучшитьприделатьубрать — словом, на сборке игра не заканчивается! Очень хочется, чтобы она продолжалась!
Вердикт:
Собирать робота из этого конструктора — не сложнее, чем паззл или «Киндер-сюрприз», только результат гораздо масштабнее и вызываЛ бурю эмоций у нас и окружающих. Отличный набор, спасибо, Даджет!
В заключение, Хабр, у меня к тебе несколько вопросов:
- Как бы ты использовал собственный манипулятор?
- Как думаешь, можно ли что-то поменять или добавить в конструкции самого робота, чтобы не останавливаться и продолжать играть?
- Что, возможно, не было мною учтено в процессе сборки?
- Да и вообще, как тебе обзор? =)
Представляем Вам новый курс по робототехники, в данной статье Вы сможете узнать как самостоятельно собрать робота.
Инструкции по сборке Pheonix Вы можете найти по ссылке:
Страница KurtE на Github :
Робот управляется с помощью беспроводного контроллера от PS2, базовый код позволяет роботу ходить в любом направлении, выбирать лапы по отдельности и разворачивать корпус. Были внесены изменения, которые необходимы были для работы с моей конфигурацией. В дополнение к этим изменениям я хотел, чтобы робот мог отслеживать разные объекты, с возможностью включать и отключать отслеживание, поэтому я использовал кнопку «Треугольник», чтобы включить режим отслеживания.
Питание робота состоит из двух батарей LiPo и двумя UBEC (Ultimate Battery Eliminator Circuit). Один LiPo и UBEC питают Arduino Mega, PS2 Receiver, Pixy Camera и Pixy MCU.
Первоначально я использовал 18 серводвигателей HS-422 на этом роботе, и, хотя это работало, мною было принято решение заменить часть серводвигателей на HS-645MG которые стоят дороже, но работают намного стабильнее. Для робота в видео я использовал 12 HS-422 и 6 HS-645MG. Я использовал 12 HS-422 для Coxas (бедра) и лап. Я использую HS-645MG для Tibia, потому что на них лежит основная масса робота.
Второй LiPo & UBEC питает SSC-32 и серводвигатели. Каждый UBEC может выдавать 8A и поднимать мощность до 15A в пике, что хорошо так как появляется большое количество мощности для запуска робота. Серводвигатели создают много электрических шумов, использованы отдельные источники питания, шум от сервомеханизма мешает радиоприемнику на пульте PS2.
Камера Pixy установлена спереди робота и является дополнительным приложением, которое позволяет роботу отслеживать объекты, камеру можно обучить слежению за разными объектами / цветами нажатием кнопки на самой камере.
Если кто-то заинтересован в модуле камеры, вот URL:
Шаг 1: Запчасти
Механические части:
Lynxmotion Phoenix Chassis Kit – Цена $39.95
Tibia Pair (Лапы) (3 шт.) Цена: $19.95 (each)
Или купить комплектом
Платформа для PS2 Ресивера & Battery (1 шт.) Цена: $8.99
Lynxmotion Phillips Head Tapping Screws – 1/4" x #2 (100) (1 шт.) Цена: $11.95
Электроника:
Arduino MEGA 2560 (1 шт.)
HS-422 Servos (12 шт.)
HS-645MG Servos (6 шт.)
Lynxmotion SSC-32 Servo Controller: (1 шт.) – Цена: $39.95
Lynxmotion PS2 Controller V4 (1 шт.) – Цена: $23.85
Pixy CMUcam5 Image Sensor (1 шт.)
Arduino Nano (1 шт.)
Servo Extension Cable 150mm (6 шт.)
Батареи и Регуляторы для Робота:
1300mAh 2S 7.4V 20C Li-Po, 13 AWG EC2 (1 шт.)
1350mAh 3S 11.1V 30C LiPo (1 шт.) – Цена: $30.99
TURNIGY 8-15A UBEC for Lipoly (2 шт.)
Необходимые инстурменты:
Крестовая отвертка
Мелкие крестовые отвертки и плоские овтертки
Двусторонняя липучая лента
Шаг 2: Постройте переднюю левую лапу

Примечание: обратите внимание на положение каждой детали; левые и правые лапы должны собираться зеркально относительно друг друга.
Все винты и пластиковые приводы которые поставляются с серводвигателями по большей части довольно понятны. При создании лап нужно подключить все серводвигатели одной лапы к портам 0, 1, 2 на SSC-32. После этого я загрузил следующий эскиз в ардуино, чтобы связать эти серводвигатели на этих портах:
Я использовал одну из своих батарей для питания всех вместе с одним набором UBEC для 6V.
Шаг 3: Постройте переднюю правую лапу

Примечание: обратите пристальное внимание на ориентацию каждой части.
Процесс сборки правой лапы такой же, как у левой ноги; с той лишь разницей, что ориентация частей зеркальна.
Шаг 4: Завершение сборки лап


Вот как должны выглядеть передние две ноги при завершении; Так же будут выглядеть средние и задние лапы.
Далее Вам необходимо собрать остальные лапы, которые также будут выглядеть точно так же, как передние две. Как только это будет завершено, Вы сможете прикрепить лапы к туловищу.
Шаг 5: Прикрепление лап к туловищу

На этом этапе Вы должны собрать лапы и туловище вместе. Более Тонкая настройка позиций лап может быть выполнена после того, как вы всё будет подключено.
Я бы предложил не привязывать SSC-32 или Arduino Mega к туловищу, пока вы не сделаете пробный запуск что бы убедится, что все соединения правильно работают, см. Шаги 6, 7 для подключения.
После проверки вашей проводки вы можете подключить SSC-32 и MEGA к туловищу.