Ювелирное обозрение
Все о ювелирных украшениях, драгоценных камнях и металлах
Какие механизмы используются для регулирования частоты вращения
Частота вращения ротора асинхронного двигателя определяется выражением:
 ,
,
из которого следует, что частоту вращения асинхронных двигателей можно регулировать изменением какой-либо из трех величин: скольжения, частоты тока в статоре или числа пар полюсов в обмотке статора.
Регулирование частоты вращения изменением скольжения возможно тремя способами: изменением величины подводимого к обмотке статора напряжения U1, нарушением симметрии этого напряжения и изменением активного сопротивления цепи ротора.
Регулирование частоты вращения изменением величины напряжения U1. Возможность этого способа регулирования подтверждается графиками M=f(s), построенными для разных значений U1 (рис. 3.22). При неизменной нагрузке на двигатель MС=const увеличение U1 вызывает рост частоты вращения. Однако диапазон регулирования частоты вращения получается небольшой, что объясняется узкой зоной устойчивой работы двигателя (см. раздел 3.1.10), ограниченной критическим скольжением и недопустимостью значительного отклонения U1 от номинального значения. Последнее обусловлено тем, что при U1 U1ном возникает опасность чрезмерного перегрева двигателя, вызванного увеличением электрических и магнитных потерь.
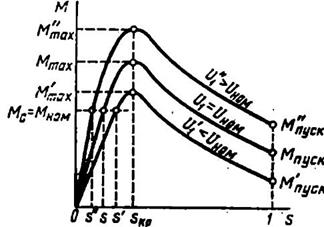
Рис. 3.22. Механические характеристики асинхронного двигателя при разных напряжениях
Регулирование частоты вращения нарушением симметрии подводимого напряжения. При нарушении симметрии трехфазной системы напряжении вращающееся поле статора становится эллиптическим (см. § 9.2). При этом оно приобретает обратную составляющую, которая создает момент, направленный встречно электромагнитному вращающему моменту двигателя, что ведет к уменьшению результирующего момента.
Механические характеристики двигателя при этом способе регулирования располагаются в зоне между характеристикой при симметричном трехфазном питании двигателя (рис. 3.23.а, кривая 1) и характеристикой при однофазном питании (кривая 2) – пределом несимметрии трехфазного напряжения (см. §9.1).
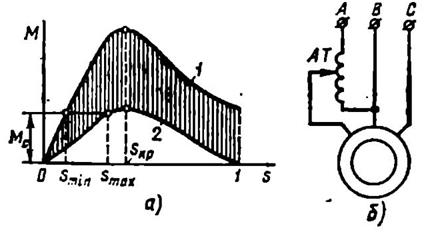
Рис. 3.23. Регулирование частоты вращения асинхронного двигателя нарушением симметрии подводимого напряжения
Регулирование несимметрии можно осуществить посредством однофазного регулировочного автотрансформатора АТ (рис. 3.23.б). При уменьшении напряжения на выходе АТ несимиетрия напряжения увеличивается, а частота вращения ротора уменьшается.
Недостатки этого метода – узкая зона регулирования (  на рис. 3.19,а) и ухудшение к.п.д. двигателя по мере увеличения несимметрии напряжения.
на рис. 3.19,а) и ухудшение к.п.д. двигателя по мере увеличения несимметрии напряжения.
Рассмотренный способ обычно применяют в двигателях малой мощности.
Регулирование частоты вращения изменением активного сопротивления в цепи ротора. Этот способ регулирования возможен лишь в асинхронных двигателях с фазным ротором.
Концы фаз обмотки ротора у этих двигателей через контактные кольца и щетки выведены наружу, что дает возможность включить последовательно с обмоткой ротора регулировочный реостат Rдоб и с его помощью изменять активное сопротивление цепи ротора (см. рис. 3.6.б)
Механические характеристики асинхронного двигателя, построенные для разных значений активного сопротивления цепи ротора, показывают, что с увеличением активного сопротивления возрастает скольжение, соответствующее заданному нагрузочному моменту сопротивления Мс (рис. 3.20). Частота вращения при этом уменьшается.
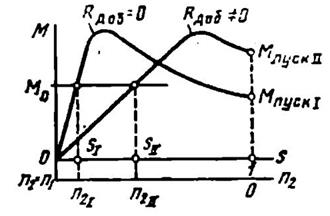
Рис. 3.24 Влияние активного сопротивления в цепи ротора на частоту вращения асинхронного двигателя
Зависимость скольжения (частоты вращения) от активного сопротивления цепи ротора выражается формулой, полученной преобразованием (3.55) и введением величины Rдоб:
 (3.74)
(3.74)
Данный способ регулирования имеет два существенных недостатка: 1) применение его ограничено лишь двигателями с фазным ротором, которые почти не применяются в автоматике; 2) он сопровождается значительными электрическими потерями в цепи ротора  . величина которых пропорциональна скольжению [см. (3.1.9)]. Кроме того, рост потерь в цепи ротора при уменьшении частоты вращения у двигателей с самовентиляцией сопровождается ухудшением условий охлаждения, так как с понижением частоты вращения уменьшается количество охлаждающего воздуха, прогоняемого вентилятором через двигатель.
. величина которых пропорциональна скольжению [см. (3.1.9)]. Кроме того, рост потерь в цепи ротора при уменьшении частоты вращения у двигателей с самовентиляцией сопровождается ухудшением условий охлаждения, так как с понижением частоты вращения уменьшается количество охлаждающего воздуха, прогоняемого вентилятором через двигатель.
Однако, несмотря на указанные недостатки, рассмотренный способ регулирования имеет существенные достоинства – плавность регулирования в широком диапазоне частот вращения и улучшение пусковых свойств двигателя (МпускII > МпускI, IпускII
Не нашли то, что искали? Воспользуйтесь поиском:
Лучшие изречения: Увлечёшься девушкой-вырастут хвосты, займёшься учебой-вырастут рога 9839 –  | 7699 –
| 7699 –  или читать все.
или читать все.
91.146.8.87 © studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам | Обратная связь.
Отключите adBlock!
и обновите страницу (F5)
очень нужно
Частота вращения асинхронного двигателя  .
.
Следовательно, регулирование частоты вращения возможно тремя способами: изменением частоты f, числа полюсов р и скольжения S.
1. Частотное регулирование
Двигатель питается от преобразователя частоты. Для получения требуемой характеристики двигателя следует изменять не только частоту напряжения, но и значение напряжения.
Если необходимо регулировать частоту вращения при постоянном моменте нагрузки МС, для обеспечения устойчивой работы двигателя следует поддерживать соотношение 
Для механизмов с вентиляторной нагрузкой MС = Kw 2 и соотношение между напряжением и частотой имеет вид  .
.
Если регулирование производится с постоянной мощностью  .
.
Этот способ является наиболее экономичным и перспективным.
– широкий диапазон регулирования;
– жесткая механическая характеристика при всех частотах;
– диапазон регулирования не зависит от нагрузки;
– высокая стоимость преобразователя частоты.
2. Изменение числа пар полюсов
Для изменения числа пар полюсов используется две конструкции двигателей:
– с несколькими обмотками на статоре, уложенные в одни и те же пазы;
– с одной обмоткой, допускающий переключение ее секций для получения различного числа пар полюсов.
Такие двигатели называют многоскоростными.
 |
– высокая жесткость механических характеристик.
– ступенчатое регулирование скорости;
– сравнительно низкий диапазон регулирования.
3. Изменение питающего напряжения
Осуществляется при помощи тиристорного регулятора напряжения (ТРН).
 |
Применяется в основном для двигателей с вентиляторной нагрузкой и для микродвигателей при необходимости регулирования скорости в небольшом диапазоне.
4. Изменение активного сопротивления цепи ротора
 Для двигателей с фазным ротором регулирование частоты вращения осуществляется путём изменения активного сопротивления в цепи ротора.
Для двигателей с фазным ротором регулирование частоты вращения осуществляется путём изменения активного сопротивления в цепи ротора.
– простота и низкая стоимость;
– мягкая механическая характеристика при малых частотах вращения;
– малая экономичность (низкий КПД);
– диапазон регулирования зависит от нагрузки.
Вследствие больших потерь рассматриваемый способ регулирования применяется для двигателей небольшой и средней мощности в тех случаях, когда требуется небольшой диапазон регулирования скорости и непродолжительная работа на пониженных скоростях. Этот способ регулирования находит применение, например, в электроприводах различных подъемно-транспортных машин и механизмов.
Не нашли то, что искали? Воспользуйтесь поиском:
Лучшие изречения: Студент – человек, постоянно откладывающий неизбежность. 10611 – | 7337 – или читать все.
91.146.8.87 © studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам | Обратная связь.
Отключите adBlock!
и обновите страницу (F5)
очень нужно
Асинхронные двигатели наиболее просты в изготовлении и наиболее дешевые, поэтому применение их в регулируемых электроприводах весьма перспективно. Однако до сих пор не найдено дешевой и экономичной системы регулирования частоты вращения асинхронных двигателей, хотя известны десятки способов регулирования их частот вращения.
Если обратиться к формуле, связывающей угловую скорость ротора с синхронной угловой скоростью и скольжением,

то из нее следует, что есть всего три варианта регулирования скорости: путем изменения частоты сети /1? числа пар полюсов р и скольжения s.
Регулирование скорости путем переключения числа полюсов ступенчатое. При жестких механических характеристиках двигателя, когда скольжение изменяется в небольших пределах, регулирование скорости экономичное. Следует иметь в виду, что ступени частоты вращения при частоте 50 Гц ир = 1 и 2 соответственно 3000 и 1500 об/мин, а при р = 5 и 6 — 600 и 500 об/мин. При большем числе полюсов разница между синхронными частотами вращения уменьшается.
Для изменения числа полюсов на статоре в одни и те же пазы можно уложить две отдельные обмотки с разными числами полюсов. В зависимости от необходимой частоты вращения включается одна или другая обмотка. При этом работают поочередно одна и другая обмотки, что снижает использование материалов. Поэтому желательно иметь одну обмотку и путем изменения схемы обмотки переключать число полюсов.
Двигатели с изменением числа пар полюсов называются многоскоростными. Промышленностью выпускаются двигатели на две, три и четыре скорости. Двухскоростные двигатели изготовляются с одной обмоткой и переключением полюсов Р2‘-Р = 2:1. Трехскоростные двигатели имеют две обмотки, причем одну — с переключением Р2:Р = 2:1. Четырехскоростные двигатели имеют две обмотки с переключением P2-Pi = 2:1. Миогоскоростные двигатели выполняются с короткозамкнутым ротором, поэтому переключение числа пар полюсов производится только на статоре.

Рис. 3.65. Переключение числа полюсов при различном соединении секций
Возможность переключения числа пар полюсов путем изменения схемы обмотки иллюстрирует рис. 3.65. При соединении секций обмотки, как показано на рис. 3.65, а, получают четыре полюса, а по схеме рис. 3.65, 6 — два. Такие переключения производят в трех фазах, а переключаемые части обмоток могут соединяться параллельно или последовательно. При переключении числа полюсов полюсное деление изменяется в 2 раза, при этом изменяется и электрический угол фазной зоны — с 60 на 120°. Чтобы направление вращения ноля при переключении числа полюсов оставалось неизменным, необходимо изменить порядок следования фаз путем переключения обмоток. На рис. 3.66 дана схема включения обмоток статора по схеме звезды, а на рис. 3.67 показано переключение обмоток статора на схему двойной звезды. При переключении по схеме рис. 3.67 со звезды на двойную звезду частота вращения изменяется в 2 раза, а момент остается одним и тем же.
Схемы рис. 3.68 при переключении чисел полюсов A/YY обеспечивают регулирование при постоянной мощности, т.е. при увеличении скорости в 2 раза момент снижается в 2 раза.

Рис. 3.66. Включение обмоток по схеме звезды

Рис. 3.67. Включение обмоток по схеме двойной звезды
При выборе числа полюсов в схеме с двумя обмотками необходимо обеспечить отсутствие наводок напряжения в отключенной обмотке. Для этого шаг одной обмотки выполняют равным половине шага второй обмотки, т.е. числа полюсов различаются в 2 раза.
При проектировании многоскоростных двигателей стремятся сохранить высокие энергетические показатели па всех синхронных частотах вращения. Поэтому многоскоростные двигатели получаются с несколько большим расходом активных материалов на единицу мощности по сравнению с обычными асинхронными двигателями.

Рис. 3.68. Переключение обмоток с треугольника на двойную звезду
Несмотря на то что многоскоростные двигатели требуют сложной коммутационной аппаратуры и имеют несколько худшие энергетические показатели, они достаточно широко применяются в промышленности для приводов станков, лифтов, вентиляторов и насосов, т.е. там, где допустимо ступенчатое регулирование частоты вращения.
В серии 4А предусмотрен выпуск многоскоростных двигателей на базе односкоростных с использованием сердечников статора и ротора базовых машин на мощность 0,12—50 кВт на две, три и четыре синхронные частоты вращения.
Наиболее простым способом, обеспечивающим илавпое регулирование частоты вращения асинхронных двигателей, является изменение скольжения (см. формулу (3.117)). Принципиальным недостатком этого способа регулирования частоты вращения является низкий КПД, так как потери в роторе пропорциональны скольжению. И какие бы пи предлагались варианты схем изменения скольжения, а их существуют десятки, в электромеханическом преобразователе энергии преобразование в тепло и в механическую мощность имеет равные возможности. В асинхронных двигателях эго проявляется особенно наглядно (Рэ2 = P3Ms)- Эта связь не зависит от способа изменения скольжения, когда в процессе регулирования участвует одна машина.
Изменять скольжение асинхронного двигателя можно многими способами. Наиболее распространенные — это изменение напряжения, введение сопротивления в цепь ротора, искажение симметрии подводимых напряжений и введение ЭДС в цепь ротора.
При изменении напряжения, подводимого к статору машины, механические характеристики изменяются так, как показано на рис. 3.69. При изменении напряжения максимальный момент изменяется пропорционально квадрату напряжения, а критическое скольжение остается неизменным. При уменьшении U изменяется точка устойчивой работы системы двигатель — нагрузка и изменяется скольжение от Sj до s2. Как следует из рис. 3.69, пределы регулирования зависят от вида механических характеристик двигателя и нагрузки.
Чтобы расширить пределы регулирования — отношение максимальной частоты вращения к минимальной (и111ах: ишш), надо иметь мягкую механическую характеристику двигателя, когда критическое скольжение двигателя находится в пределах 1-^3. Двигатели с большим критическим скольжением, работающие в системах автоматического управле-

Рис. 3.69. Регулирование частоты вращения путем изменения

Рис. 3.70. Двигатель с полым ротором:
1 — статор; 2 — внутренний статор; 3 — обмотка статора; 4 — полый ротор; 5 — подшипниковый щит; 6 — подшипниковый щит с втулкой для внутреннего статора; 7 — вал; 8 — корпус; 9 — крышка подшипника
ния, называются исполнительными. К ним относятся асинхронные двигатели с массивным ротором и двигатели с полым ротором (рис. 3.70).
В исполнительных асинхронных двигателях важно иметь большое быстродействие и большую кратность пускового и максимального моментов. В двигателе с полым ротором ротор выполняется в виде тонкостенного стакана из алюминия. Ротор имеет небольшой момент инерции. Малый момент инерции, большое критическое сопротивление обеспечивают большое быстродействие и линейность механических характеристик в широком диапазоне изменения частоты вращения. Двигатели с полым ротором широко используются в системах автоматического управления и выпускаются промышленностью до мощности 30 Вт. Недостатком двигателей с полым ротором является наличие большого воздушного зазора, включающего в себя два механических зазора и толщину немагнитного ротора. Большой воздушный зазор снижает coscp, а это приводит и к снижению КПД.
Основной проблемой при создании силовых исполнительных двигателей на мощности в сотни ватт и выше является отвод тепла. При использовании исполнительного двигателя как моментного, работающего длительно при s
1, практически вся мощность преобразуется в тепло. Для отвода тепла приходится увеличивать габариты двигателя, чтобы снизить электромагнитные нагрузки и увеличить поверхность охлаждения. Применяются также вентиляторы- наездники, встраиваемые в двигатель, системы водяного и испарительного охлаждения. В исполнительном двигателе с веитилятором-наездником вентилятор вращается специальным асинхронным двигателем, частота вращения которого не зависит от частоты вращения исполнительного двигателя.
Изменять частоту вращения асинхронного двигателя можно, вводя активное сопротивление в цепь ротора (рис. 3.71). В двигателе с фазным ротором регулировочный резистор подключается к кольцам, и при изменении активного сопротивления резистора двигатель плавно или ступенями, в зависимости от конструкции резистора, переходит с одной механической характеристики па другую.
Преимущество регулирования частота вращения путем изменения активного сопротивления ротора в том, что максимальный момент остается неизменным, так как не изменяется напряжение, подводимое к двигателю. Включение резистора в обмотку ротора приводит к тому, что частично потери в роторе выделяются в резисторе. При этом отношение потерь, выделяемых в роторе и в резисторе, пропорционально отношению активных сопротивлений обмотки ротора и резистора. Выведение потерь из машины дает возможность уменьшить габариты машины.
При регулировании частоты вращения асинхронных исполнительных двигателей находит применение комбинированный способ регулирования, когда изменяются подводимое к двигателю напряжение и активное сопротивление ротора.
При изменении частоты вращения изменяется частота в роторе/2 =/)S. За счет вытеснения тока при изменении /2

Рис. 3.71. Регулирование частоты вращения асинхронного двигателя путем изменения активного сопротивления ротора можно получить необходимый закон изменения г2. Для этого на стальной ферромагнитный диск укладывается трехфазная обмотка, соединенная с фазной обмоткой ротора. При увеличении частоты /2 растет активное сопротивление короткозамкнутой обмотки, выполненной в виде диска, и частота вращения изменяется за счет напряжения и активного сопротивления обмотки ротора.
Преимущество такого исполнительного двигателя — отсутствие скользящих контактов и лучшие условия охлаждения вращающегося диска. Такой двигатель имеет и ряд крупных недостатков: большой момент инерции, технологические трудности в намотке обмотки на диски и тяжелые тепловые режимы работы обмотки, намотанной на стальной диск, в котором в основном выделяются потери скольжения. Изменение активного сопротивления стального диска с обмоткой, в которой протекают трехфазные токи, используется и в пусковых резисторах для пуска асинхронных двигателей с фазным ротором.
Регулирование напряжения на выводах двигателя осуществляется путем включения реакторов насыщения, магнитных усилителей, автотрансформаторов и тиристорных преобразователей напряжения. Последние в настоящее время получили наибольшее распространение.
Тиристорные преобразователи напряжения включают последовательно в обмотку статора двигателя (рис. 3.72). Через преобразователь проходит вся мощность двигателя, и габариты преобразователя несмотря на применение тиристоров в 1,5—2,5 раза больше габаритов двигателя.

Рис. 3.72. Схема регулирования частоты вращения с тиристорным регулятором напряжения
Магнитные усилители в качестве регуляторов применяют реже, так как они имеют достаточно большие габариты. На рис. 3.73 показана реверсивная схема с применением магнитных усилителей. Асинхронный исполнительный двигатель включен в плечи моста. При насыщении магнитных усилителей МУ1 и МУЗ асинхронный двигатель вращается в одну сторону, а при насыщении магнитных усилителей МУ2,
МУ4 — в другую, так как при этом изменяется фаза напряжения на обмотках двигателя.

Рис. 3.73. Реверсивная схема регулирования частоты вращения асинхронных двигателей:
Проблема регулирования частоты вращения асинхронных двигателей оригинально решена в двигателях-усилителях, в которых магнитные усилители выполнены на спинке статора с намоткой обмоток магнитного усилителя в те же пазы, что и двигателя.
Мощность скольжения Рэмх может быть использована или частично возвращена в сеть, если использовать дополнительно другие электрические машины или статические преобразователи частому 1 – МУ4 – магнитные ты. Такие схемы регулирования усилители называются каскадными.
На рис. 3.74 представлена схема электромеханического каскада. В асинхронном двигателе с фазным ротором ЛД в обмотку ротора включен выпрямитель и мощность скольжения после преобразователя поступает па якорь двигателя постоянного тока ДПТ. Якорь двигателя постоянного тока жестко соединен с валом асинхронного двигателя, и к моменту, развиваемому асинхронным двигателем, МАд добавляется момент двигателя постоянного тока МдПт’ Таким образом, мощность скольжения в каскаде используется для создания дополнительного момента.
В электрическом каскаде (рис. 3.75) мощность скольжения асинхронного двигателя АД после преобразователя сно-

Рис. 3.74. Электромеханический каскад

Рис. 3.75. Электрический каскад ва подается на двигатель постоянного тока ДПТ, на валу которого находится синхронный генератор СГ. Синхронный генератор отдает электрическую энергию в сеть. В этой схеме мощность скольжения отдается в сеть.
Недостатком обеих схем является наличие машины постоянного тока и силовых выпрямителей. Габариты выпрямителей и двигателя постоянного тока зависят от пределов регулирования.
Рассмотренные каскадные схемы с машиной постоянного тока нс являются единственными. В каскадах применяются коллекторные двигатели переменного тока, одноякорные преобразователи и другие машины. Более подробно каскадные схемы анализируются в гл. 7.
Интересной схемой регулирования частоты вращения асинхронного двигателя является двигатель с поворотным статором (рис. 3.76). Этот двигатель имеет общий ротор и два статора, один из которых может поворачиваться относительно другого. Когда электрические оси двух статоров совпадают, в обмотке ротора наводятся ЭДС, действующие согласно, и мощность, развиваемая агрегатом, равна удвоенной мощности одной машины.
Короткозамкнутый ротор двигателя имеет среднее корот- козамыкающее кольцо с большим сопротивлением 1 и два крайних кольца с небольшим активным сопротивлением 2. При повороте одного статора относительно другого смещаются потоки и ЭДС в обмотке статора. Токи ротора начинают замыкаться но кольцу 1 с повышенным активным сопротивлением. Путем изменения угла между статорами дост игается регулирование частоты вращения. При этом механические характеристики получаются близкими к характеристикам, получаемым при изменении напряжения и активного сопротивления ротора. Этот двигатель предложен П. Бушеро в 1899 г.

Рис. 3.76. Двигатель с поворотным статором
Видоизменением двигателя Бушеро является машина, в которой поворот оси поля одной машины относительно другой осуществляется путем переключения секций обмоток каждой фазы. Поворот оси поля одной из обмоток можно осуществить также при помощи индукционного регулятора.
Рассмотренные схемы регулирования частоты вращения путем изменения скольжения далеко не исчерпывают имеющихся предложений.
Наиболее перспективным способом регулирования частоты вращения асинхронных двигателей является частотный. Изменение частоты, подводимой к двигателю, осуществляется преобразователем частоты ПЧ (рис. 3.77). При частотном регулировании изменяется синхронная частота вращения, а двигатель работает с небольшим скольжением. Регулирование экономичное, однако через преобразователь частоты проходит вся мощность, и габариты преобразователя частоты превышают габариты двигателя. При преобразовании частоты и напряжения сети преобразователь частоты
изменяет напряжение и частоту на выходе по закону у =
= const, что обеспечивает работу асинхронного двигателя при постоянном магнитном потоке.
Регулировать частоту можно и в статоре, и в роторе. В двигателях большой мощности удобнее регулировать частоту в роторе, так как при небольших пределах регулирования частоты вращения мощность скольжения P:ms значительно меньше мощности обмотки статора. Поэтому преобразователь частоты имеет меньшие габариты. В этом случае мощность в воздушный зазор поступает со стороны статора и ротора. Такие машины получили название асинхронных двигателей двойного питания, а способ регулирования частоты вращения называют введением ЭДС в цепь ротора. Этот способ занимает среднее положение между частотным способом и способом изменения скольжения.
Несмотря па применение тиристоров, частотный привод все еще не занял доминирующего положения в регулируемых приводах с асинхронными двигателями. В последнее

Рис. 3.77. Схема частотного регулирования частоты вращения асинхронных двигателей время в связи с появлением силовых транзисторов при параллельном их соединении появилась возможность создать дешевый малогабаритный преобразователь частоты на мощность в несколько киловатт. Следует иметь в виду, что введение в энергосистему большого количества нелинейных элементов приводит к появлению высших гармоник в сети и искажению синусоидальности напряжений. Ухудшение качества электроэнергии приводит к потерям в энергосистеме. Затраты па повышение качества электроэнергии следует относить к стоимости силовых электроприводов с нелинейными элементами.