Ювелирное обозрение
Все о ювелирных украшениях, драгоценных камнях и металлах
Как сделать из кубиков робота
Содержание
- 1 Что такое LEGO Boost
- 2 1. Робот Верни. Отличный собеседник и друг
- 3 2. Киберкот Френки. Идеальный питомец без шерсти и неприятных запахов
- 4 3. Гитара 4000. Играет как настоящая
- 5 4. Фабрика роботов. Для создания своей армии Терминаторов
- 6 5. Вездеход (M.T.R.4). Проедет по любому ковру
- 7 Как программировать конструктор?
- 8 Сложно собрать своего робота?
- 9 Выбираем платформу
- 10 Печатаем детали и собираем корпус
- 11 Управление сервоприводами
Конструкторы LEGO знакомы каждому. За несколько десятилетий наборы разноцветных пластмассовых деталек стали поистине культовыми: дети с удовольствием собирают из них замки, машины и космические корабли, а взрослые – целые настоящие города.
Сегодня LEGO не только развивает мелкую моторику и фантазию. Новый набор LEGO Boost предлагает в буквальном смысле оживить собранный конструктор, используя смартфон или планшет.
То есть, собранный киберкот действительно будет мурчать, робот разговаривать и ездить а гитара выдавать бешеные «соляги».
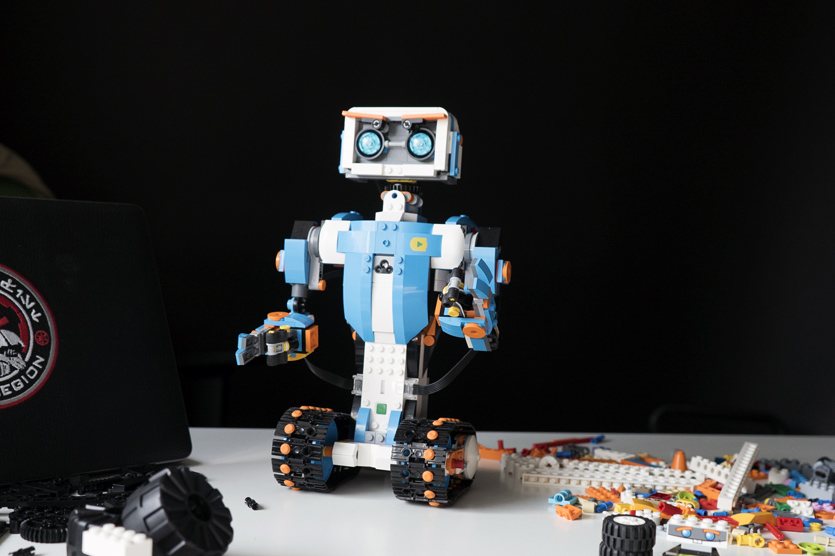
Как это выглядит? Я собрал своего робота и сейчас всё расскажу.
Что такое LEGO Boost

Lego Boost – это развивающий конструктор, состоящий из 847 деталей. из них можно собрать на выбор одну из 5-ти моделей:
1. Робот Верни
2. Кот Фрэнки
3. Гитара 4000
4. Фабрика роботов
5. Вездеход (M.T.R.4)
Основными элементами каждой модели являются 3 детали: это основной механический блок, датчик определения цветов и расстояния и интерактивный двигатель.
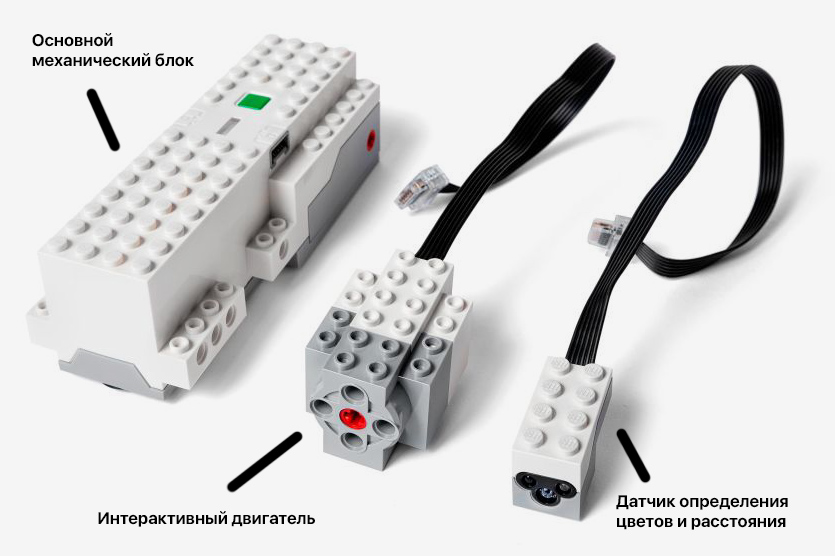
Основной механический блок является «сердцем» LEGO Boost, который приводит собранный конструктор в движение. Именно к нему можно подключить свой iPhone или iPad, чтобы запрограммировать собранную модель на выполнение разных команд и даже общение с владельцем.
К механическому блоку подключаются два других: датчик цвета и расстояния реагирует на внешние раздражители, помогая игрушке объезжать препятствия или следовать своему сценарию поведения при виде определённого цвета, а интерактивный двигатель оживляет конструктор, вращая гусеницы или колёса (смотря что соберёте).

Для программирования конструктора понадобится приложение LEGO Boost Creative Toolbox [скачать в App Store]. Скачать его придётся в обязательном порядке, потому что в коробке с конструктором нет бумажных инструкций – все этапы сборки каждой из 5-ти моделей наглядно показываются в приложении.
Про каждую модель можно написать отдельный обзор, но я расскажу кратко о возможностях каждого робота LEGO Boost:
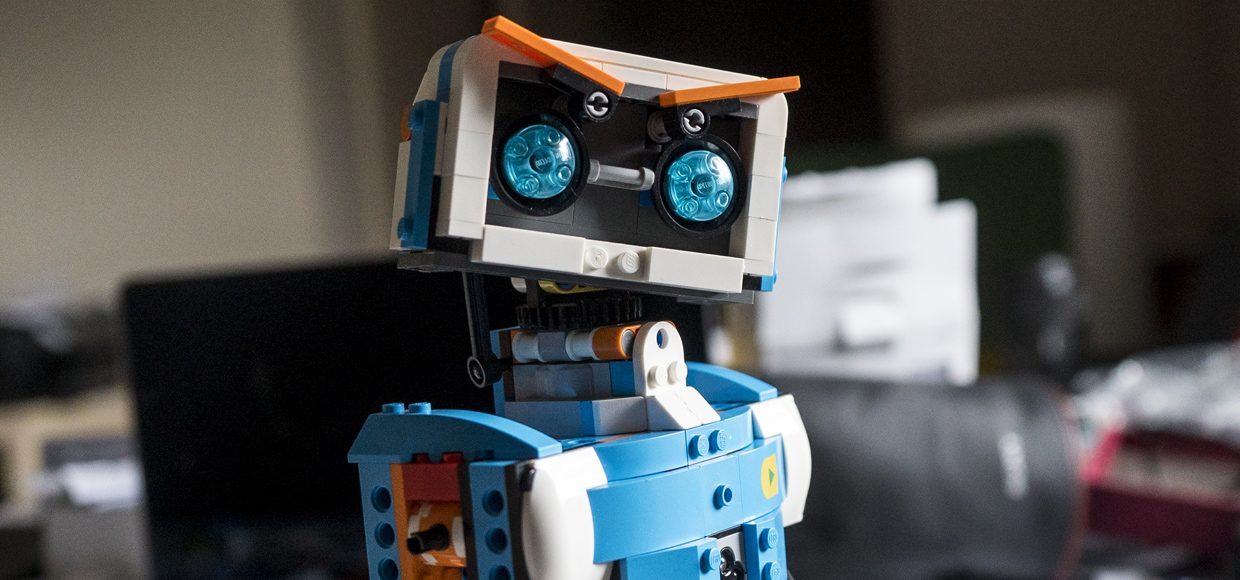
1. Робот Верни. Отличный собеседник и друг
Робот Верни может ездить и крутиться вокруг своей оси, разговаривать, различать цвета и объезжать препятствия. К роботу можно собрать пушку и стрелять по мишени.
С помощью дополнительных аксессуаров робота можно превратить в танцора, диджея, полицейского или хоккеиста. Чтобы разобраться и попробовать все возможности Верни уйдет не один час.
Верни умеет выражать эмоции с помощью подвижных бровей: удивление, злость и радость. Это просто нужно видеть, чтобы оценить как удивительно точно игрушке удаётся радоваться или грустить при помощи всего лишь нескольких двигающихся деталек.
Вот короткое видео, в котором робот Верни ведет себя неприлично:
Робот не умеет сам двигать руками, однако он может сжать в «пальцах» мелкие предметы и отвезти их из одной точки в другую.
Нет, пиццу не принесет. Может быть, это в следующем поколении LEGO Boost пофиксят 🙂
2. Киберкот Френки. Идеальный питомец без шерсти и неприятных запахов
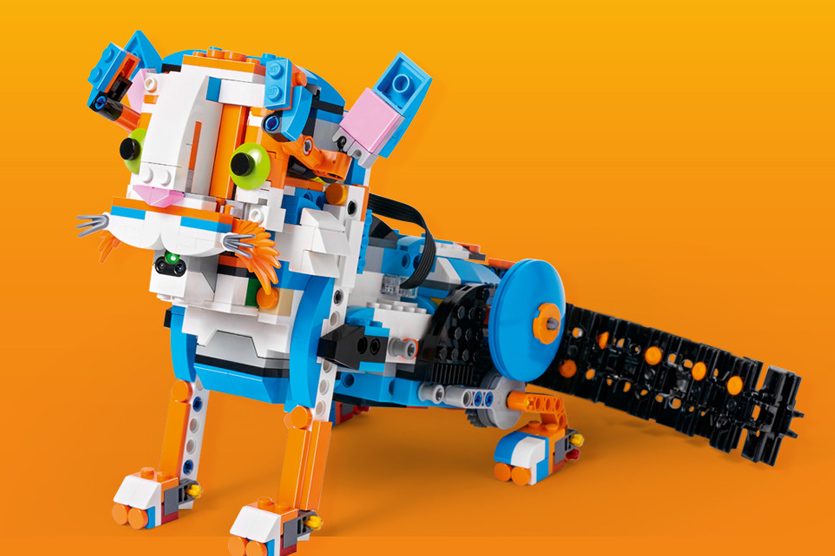
Киберкот по имени Френки не умеет передвигаться сам, зато может вставать на задние лапы, двигать ушами и вилять хвостом. Френки можно погладить, и он отзовётся довольным мурлыканием, а можно заставить его сыграть на губной гармошке, причём мелодия зависит от цвета, который нужно показать киберкоту.
У Френки тоже есть мимика, правда брови ему нужно двигать руками. Интерактивные элементы заняты в вышеописанных процессах виляния хвостом и вставанием на задние лапы.
Да, мы всё ещё говорим про конструктор LEGO.
3. Гитара 4000. Играет как настоящая
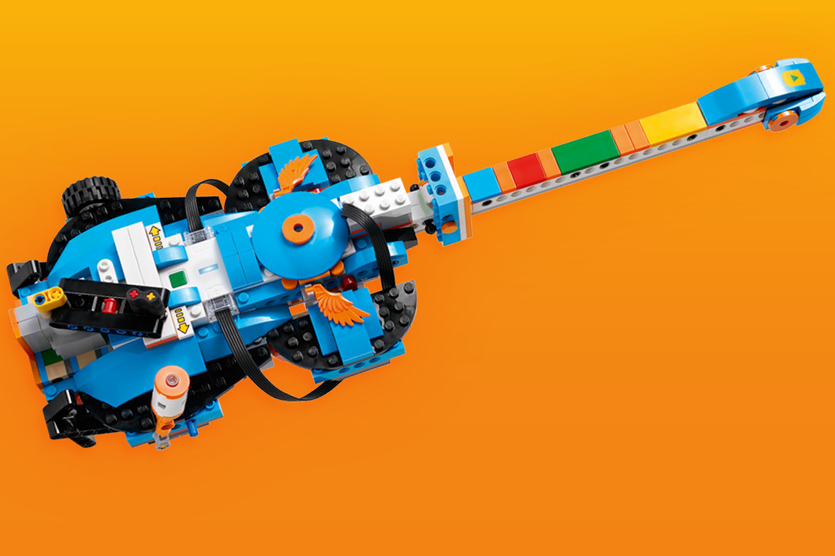
Гитара 4000 является почти настоящим музыкальным инструментом, с помощью которого можно играть музыку. Аккорды зажимать не нужно, вместо этого предлагается передвигать «слайдер» по грифу гитары. Датчик движения отслеживает положение «слайдера» и даёт команды на воспроизведение разных звуков.
Вторая рука тоже нужна, чтобы имитировать удары по невидимым струнам с помощью специального рычажка. Есть даже специальный контроллер для получения звука «тремоло» во время сольных запилов.
Кстати, эта модель может проигрывать не только гитарные звуки, но и любые другие. Так что почему бы не использовать её в качестве сэмпл-машины, чтобы почувствовать себя настоящим диджеем?
4. Фабрика роботов. Для создания своей армии Терминаторов

Это самая сложная модель из всех пяти, но и самая крутая. После сборки фабрика может сама собирать небольших роботов из кубиков LEGO.
Натурально, весь процесс автоматический. Выглядит завораживающе, но лучше всего это может передать видео.
Краткий гайд по созданию армии роботов:
Я жалею, что сначала собрал робота Верни. Надо было собирать вот эту фабрику, чтобы завалить видеороликами, какой LEGO Boost крутой конструктор, весь инстаграм.
5. Вездеход (M.T.R.4). Проедет по любому ковру

Тяжёлая машина на гусеничном ходу с большими колёсами с лёгкостью проедет по заданному маршруту, объезжая препятствия. На вездеход можно собрать дополнительные аксессуары: пушку, ковш, катапульту и даже строительные конусы, которые игрушка будет аккуратно объезжать.
Датчик расстояния здесь выполняет роль обнаружителя предметов: если вездеход с ковшом подъедет к небольшому «грузу», то датчик даст команду игрушке поднять ковш и положить предмет в кузов.
Лучше всего один раз увидеть, как это происходит:
По схожему принципу работают и другие аксессуары вместе с датчиком движения. Если нет доверия датчикам, можно перейти в режим ручного управления: на экране iPhone или iPad появятся виртуальные джойстики, с помощью которых можно управлять движением вездехода и работой ковша, катапульты или пушки.
Как программировать конструктор?
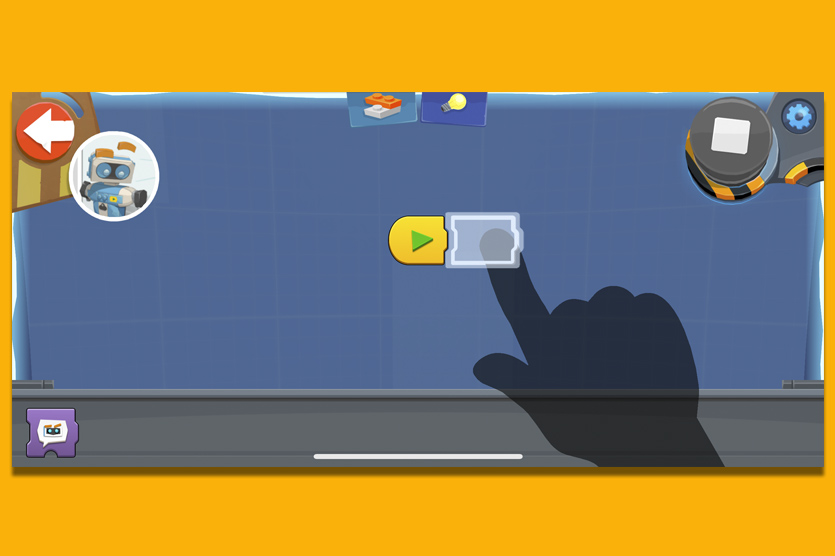
Приложение LEGO Boost напоминает игру, где каждый уровень помогает освоить новые навыки взаимодействия с конструктором. В самом начале можно увидеть всех роботов и выбрать того, кого хочется собрать.
Для программирования готового робота не нужно уметь даже читать и писать: все команды выглядят как разноцветные блоки, которые нужно просто перетащить на временную шкалу в желаемом порядке.

Все блоки команд разделены по типам и цвету. В некоторых случаях можно самому задать время выполнения той или иной команды, а некоторые блоки выполняют случайные действия, что делает робота более «живым» и самостоятельным.
Конструктор LEGO Boost способен воспринимать и интерактивные команды: можно помахать перед роботом рукой, произнести кодовое слово или прикоснуться, чтобы начал выполняться заранее заданный алгоритм. При составлении алгоритмов действий доступны целые циклы, что уже приближает управление игрушкой к настоящему программированию.
Сложно собрать своего робота?

Для взрослого человека сборка любой модели LEGO Boost займёт 2-3 часа. Для ребенка же весь процесс растянется на несколько дней, особенно если чаду еще нет 10-ти лет.
Лично я справился с роботом Верни за 4 часа. И даже без помощи взрослых!
После сборки игрушка получается прочная, можно даже уронить со стола без опаски, что конструкция разлетится на мелкие куски. Правда бить роботом об пол со всего размаху или топтаться по нему ногами я не рекомендую. Это же всё-таки LEGO.
Важно помнить, что основной механический блок работает от 6-ти батареек формата ААА, которых нет в комплекте. Нужно прикупить отдельно.

LEGO Boost стоит всего 9 990 руб., но при этом развивает абстрактное мышление, тренирует коммуникабельность детей, собирающих его вместе, дает базовые навыки профессии программиста, которая становится все более актуальной.
А главное, процесс сборки конструкторов LEGO – это всегда весело, как детям так и взрослым.
 (5.00 из 5, оценили: 2)
(5.00 из 5, оценили: 2)
Содержание статьи
Мне не хотелось повторять уже готовое изделие. Чтобы лучше понимать, как функционирует робот, и научиться чему-то новому, я решил делать все сам.
Подробно о том, как начать свою карьеру в электротехнике, читай в статье «Я у мамы инженер! Как перестать бояться паяльника и начать творить».
Выбираем платформу
Любой робот состоит из двух основных систем: механической и электронной. Для механической составляющей я рассматривал конструктор Lego, но его наборы могли оказаться очень дорогими, к тому же к нему очень сложно пристроить нестандартные части и блоки. Поэтому я остановился на проекте с сайта Otvinta.com и взял за основу их конструкцию. Ее детали можно легко распечатать на 3D-принтере.
В качестве платформы для электронного блока управления я выбрал смартфон на Android и микроконтроллер Arduino, которые связал по USB. На мой взгляд, такая платформа оптимальна для создания простых и дешевых роботов.
У современных смартфонов есть все необходимое: камера, Bluetooth, Wi-Fi, USB, GPS-датчик, сенсорный дисплей для управления, достаточно мощный процессор и большой объем памяти. Можно использовать бюджетный смартфон, чтобы уменьшить стоимость проекта.
Микроконтроллер Arduino нужен, чтобы отвечать за процессы реального времени: управлять сервоприводами, считывать информацию с внешних датчиков, получать управляющие команды со смартфона по USB и отправлять на него нужные данные.
Мой выбор остановился на смартфоне Motorola Moto G и микроконтроллере Arduino Mega 2560.
 Смартфон Motorola Moto G
Смартфон Motorola Moto G 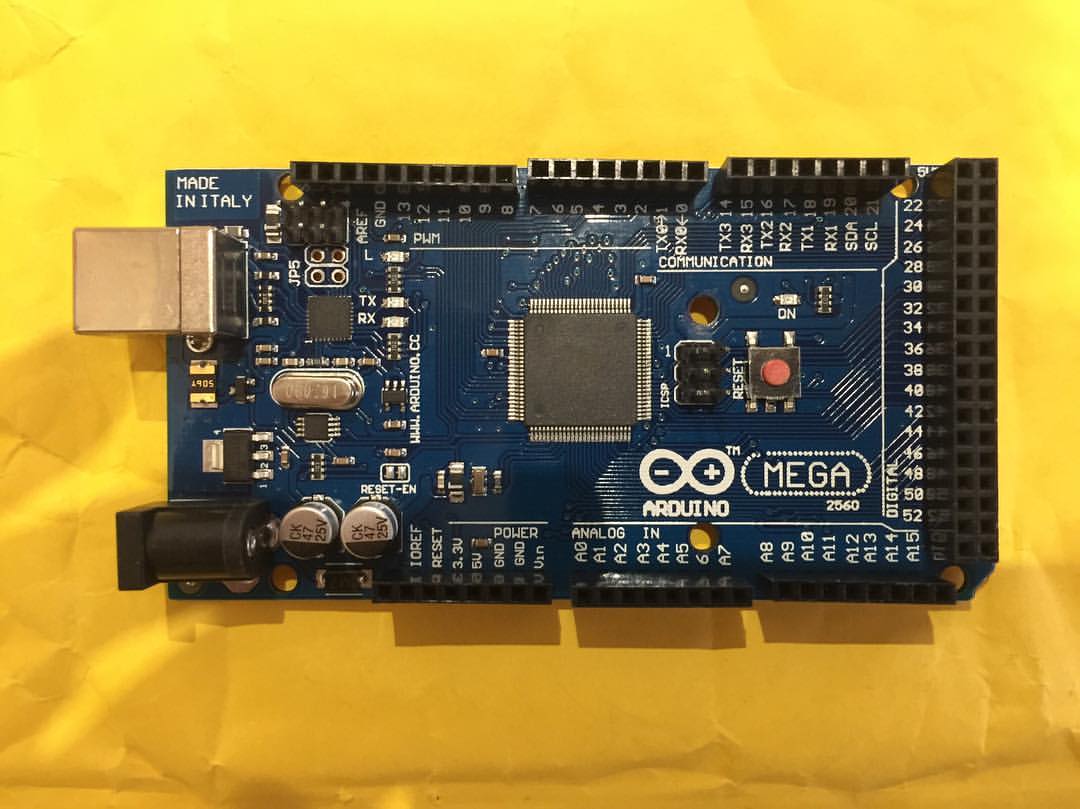 Микроконтроллер Arduino Mega 2560
Микроконтроллер Arduino Mega 2560
Печатаем детали и собираем корпус
Модели всех деталей для корпуса робота можно скачать и распечатать на 3D-принтере (ZIP). Лучше печатать с максимальной точностью. Я этот момент не учел, поэтому детали потом пришлось подправлять с помощью наждачной бумаги.
Внутри деталей принтер оставляет полости, что сказывается на их прочности. Несколько деталей сломались при сборке, и мне пришлось их склеивать. Поэтому советую распечатывать мелкие детали без полостей внутри.
Сервоприводы советую брать оригинальные, они лучше подходят по конструкции и должны работать надежнее.
Крепеж я купил на строительном рынке. Корпус собирал по инструкции, это оказалось несложно.
Также роботу нужны два блока питания: на 12 В для Arduino и на 5 В для питания сервоприводов.
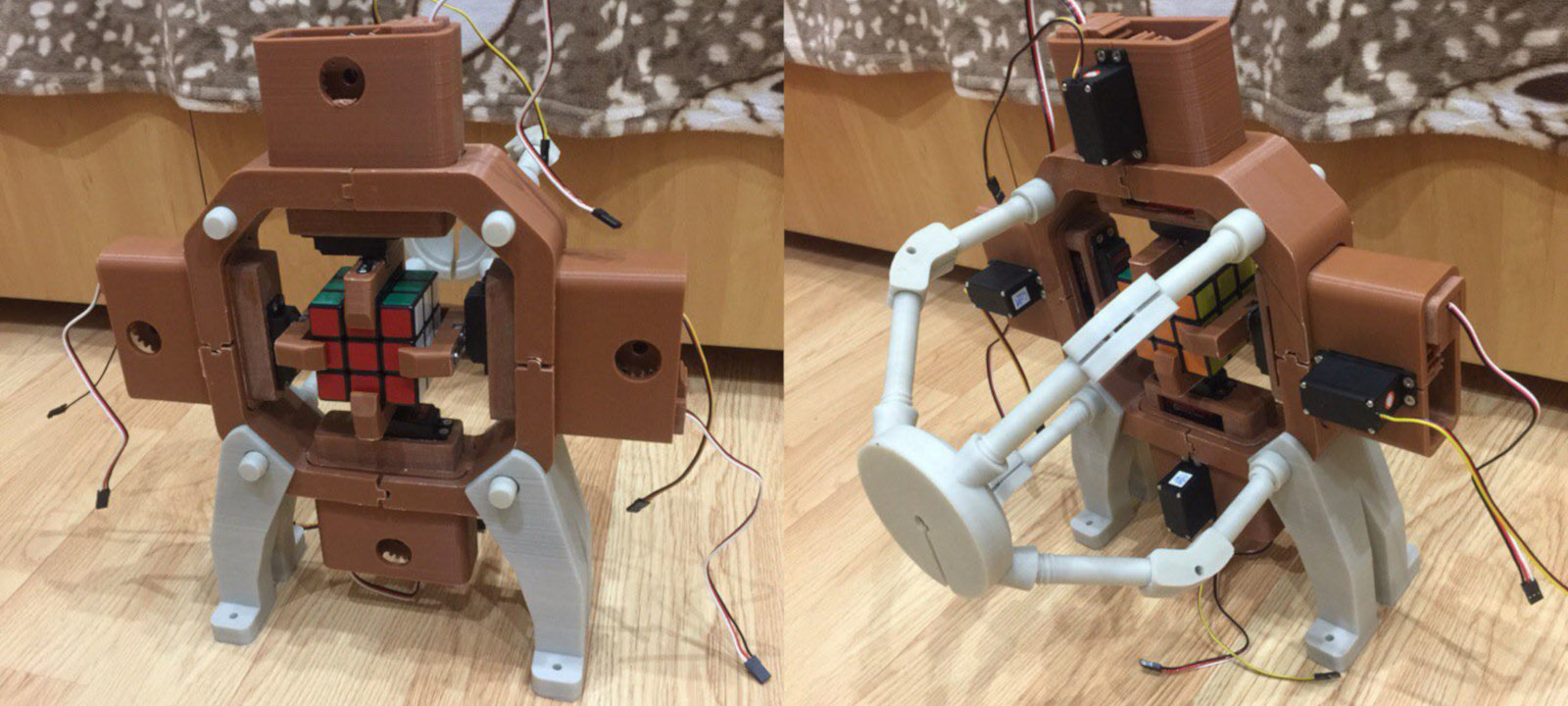
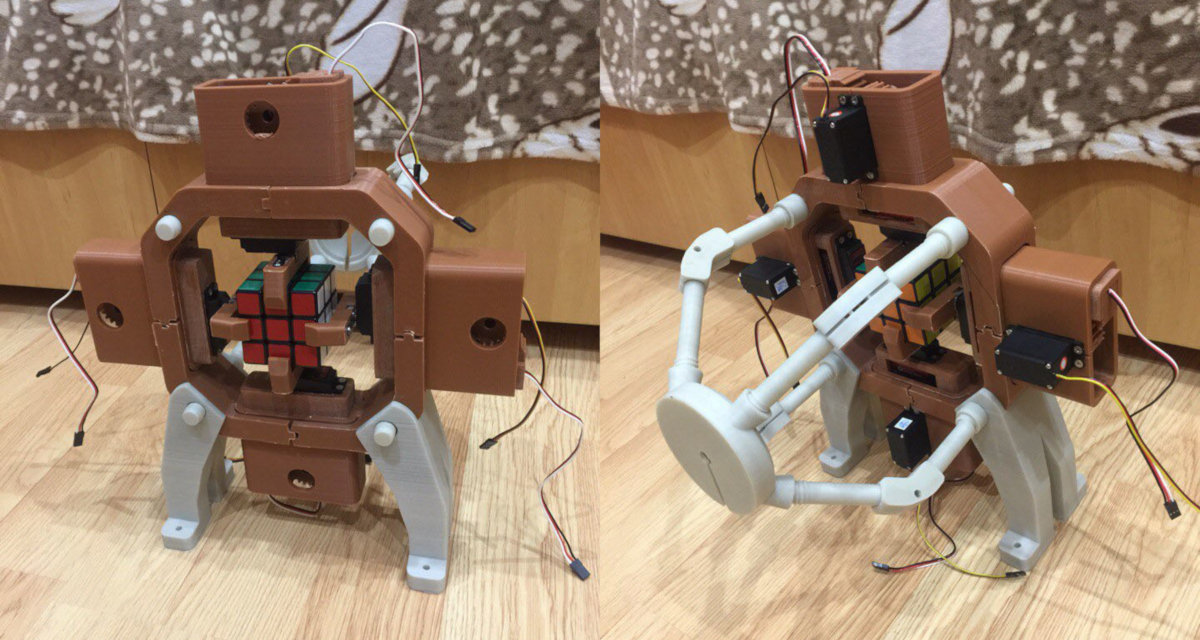 Механическая часть робота
Механическая часть робота
Осталось прикрепить к корпусу робота микроконтроллер Arduino и смартфон. Смартфон приделаем к задней части корпуса с помощью специального держателя таким образом, чтобы его камера была направлена на кубик в центре.
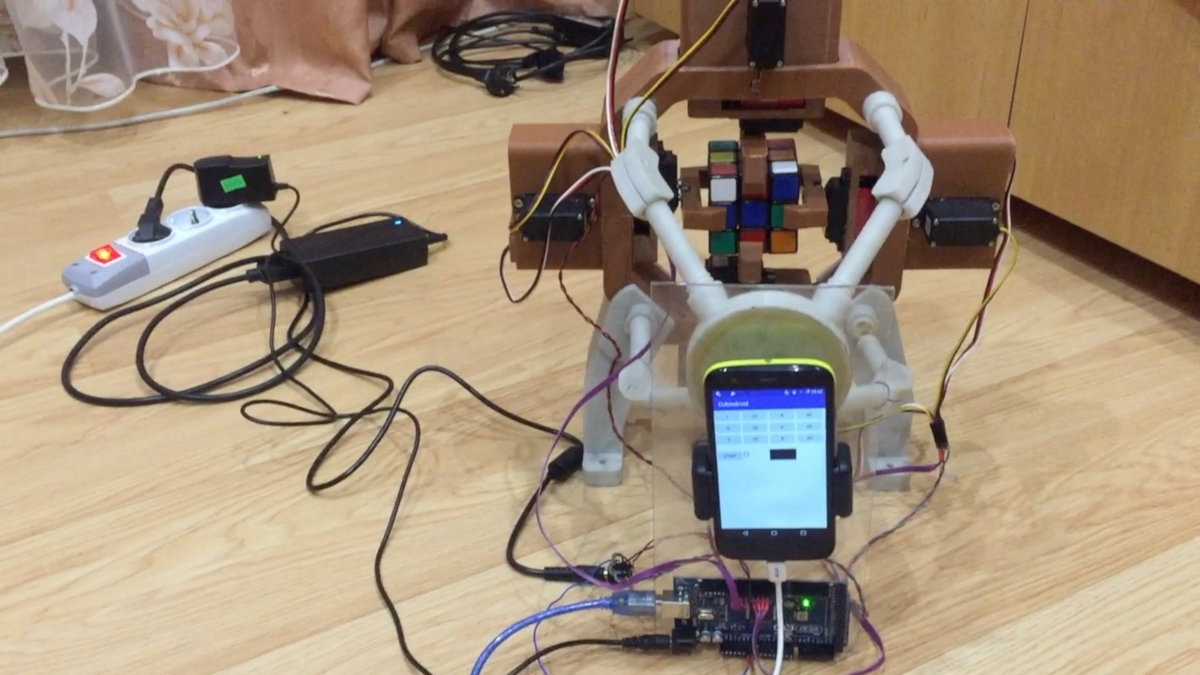 Робот собственной персоной
Робот собственной персоной
Сервоприводы подключаем к микроконтроллеру и подаем на них питание. Теперь, когда механическая часть робота собрана, мы готовы приступить к написанию программ, которые будут управлять нашим устройством.
Управление сервоприводами
Управлять сервоприводами у нас будет микроконтроллер Arduino Mega 2560. Чтобы написать для него программу, понадобится средство разработки. Arduino IDE свободно распространяется в интернете и работает на любой современной ОС. После ее установки создаем новый скетч для написания исходного кода. Язык программирования похож на C, что сильно облегчит нашу работу.
Продолжение доступно только участникам
Вариант 1. Присоединись к сообществу «Xakep.ru», чтобы читать все материалы на сайте
Членство в сообществе в течение указанного срока откроет тебе доступ ко ВСЕМ материалам «Хакера», увеличит личную накопительную скидку и позволит накапливать профессиональный рейтинг Xakep Score! Подробнее
Не так давно обзавелся набором LEGO MINDSTORMS EV3 (31313) и с удивлением обнаружил, что в русскоязычном сегменте интернета довольно мало интересных материалов и инструкций по сборке и настройке роботов из этого набора. Решил, что нужно это дело исправлять.
Эта инструкция представляет собой вольный перевод материалов с официального сайта проекта MindCub3r и дополнена опытом самостоятельной сборки этого робота, способного собрать кубик Рубика меньше чем за 2 минуты.
Подробнее о LEGO MINDSTORMS EV3 можно почитать на этом сайте.
Вот, что у нас должно получится в итоге:
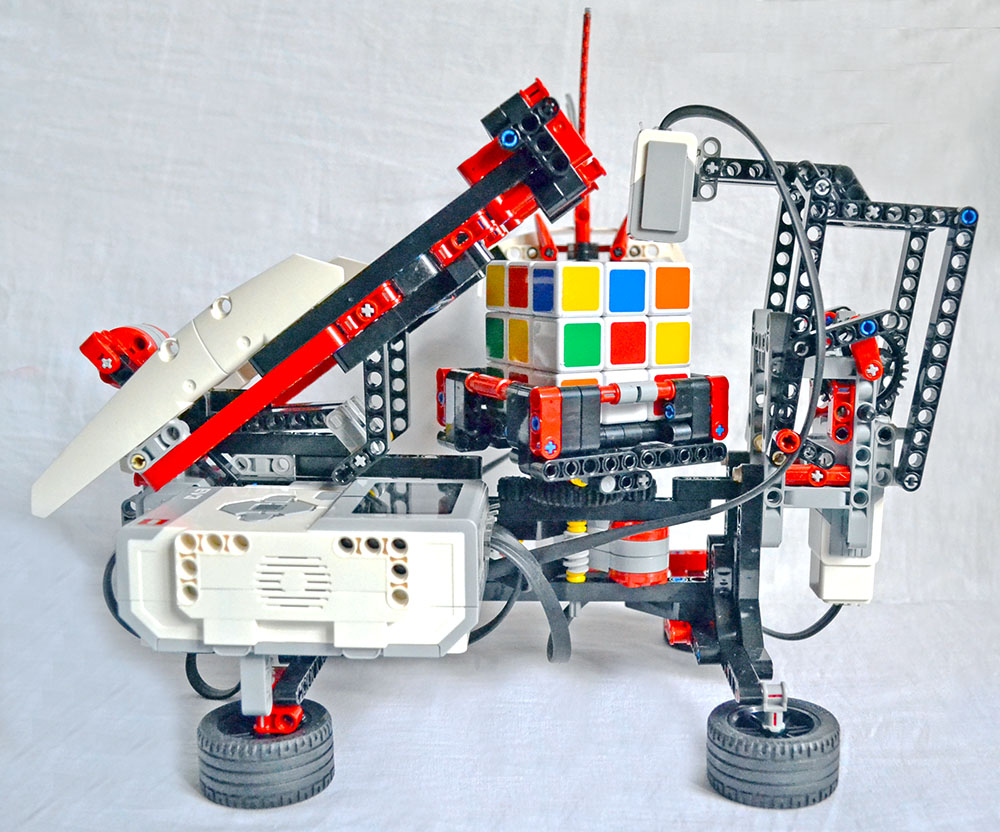
MindCub3r можно построить из одного комплекта Lego Mindstorms EV3 (31313, Home Edition).
Также вам понадобится инструкция по сборке и программное обеспечение, разработанное авторами проекта.
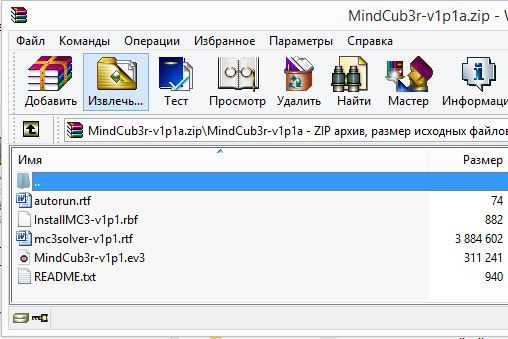
Буквально позавчера автор проекта объявил в своем ФБ, что подправил программное обеспечение для своего робота, и теперь оно работает со «штатной» прошивкой «кирпича» 1.06Н. На главной странице проекта эта информация также уже появилась, архив MindCub3r-v1p1a.zip, содержащий, среди прочего, и обновленную версию программы, уже доступен для загрузки. Загрузка и установка блока для датчика цвета по-прежнему необходима.
Дальнейший текст статьи исправлен с учетом последних изменений на сайте проекта!
Инструкцию по сборке MindCub3r смотрим или скачиваем здесь.
Прошивку (на момент написания статьи EV3-Firmware-V1.06H.bin) для кирпича скачиваем с официального сайта LEGO MINDSTORMS здесь.
Архив MindCub3r-v1p1a.zip с файлами проекта (MindCuber-v1p1.ev3, autorun.rtf и mc3solver-v1p1.rtf) качаем тут.
Еще нам понадобится прошивка для датчика цвета, которую берем здесь. Все дело в том, что стандартные настройки этого датчика не корректно определяют цвета в режиме RGB.
После того, как вы соберете робота и скачаете себе на компьютер все необходимое, можно приступать к настройке.
Если вы еще не обновили прошивку «кирпича» первым делом устанавливаем новую версию ПО для главного блока Mindstorms EV3:
1. Запускаем программное обеспечение LEGO MINDSTORMS EV3;
2. Выбираем Инструменты — Обновление встроенного ПО;

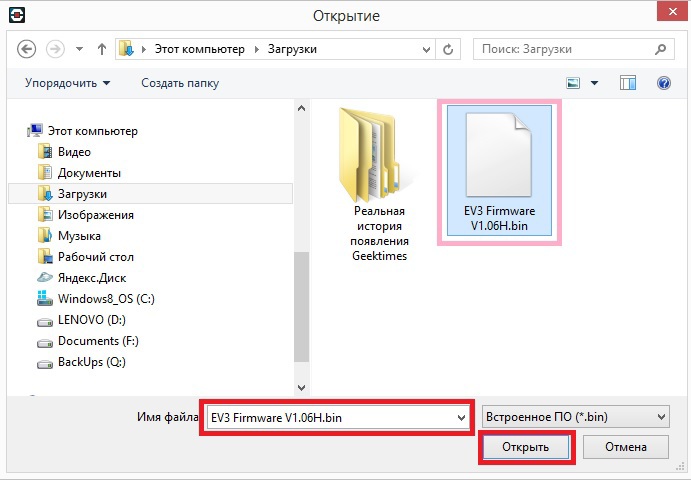
3. В появившемся диалоговом окне нажимаем «Просмотреть», находим предварительно закаченный файл EV3-Firmware-V1.06H.bin и жмем «Открыть»;
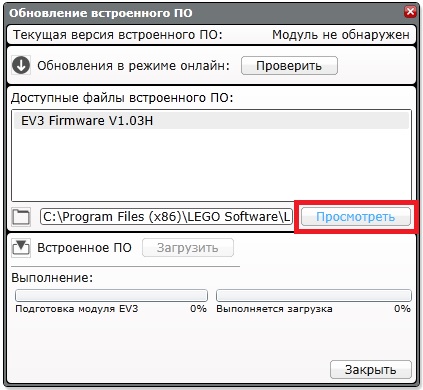
4. В диалоговом окне в таблице «Доступные файлы встроенного ПО» выбираем EV3-Firmware-V1.06H и жмем «Загрузить». Ждем окончания загрузки;

5. Перезагружаем главный блок (выключаем и снова включаем).
Далее устанавливаем прошивку для датчика цвета:
1. В ПО LEGO MINDSTORMS EV3 открываем новый пустой проект;
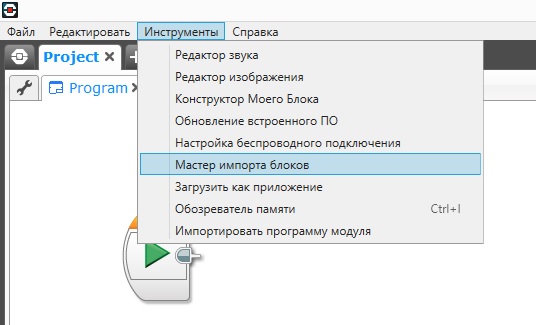
2. Выбираем Инструменты — Мастер импорта блоков;
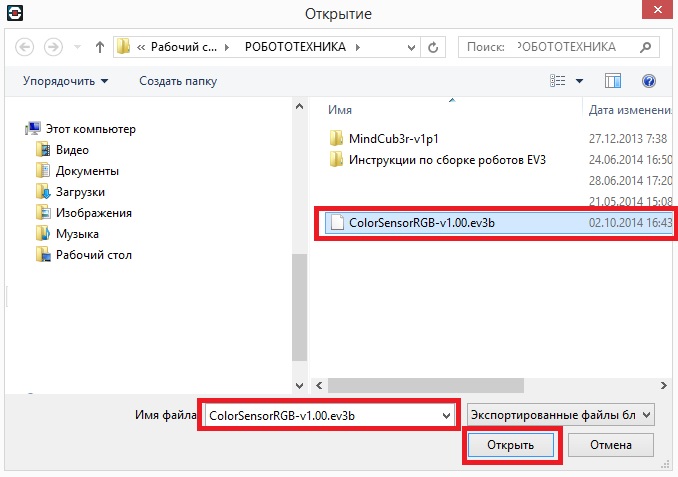
3. В появившемся диалоговом окне нажимаем «Просмотреть», находим предварительно загруженный файл ColorSensorRGB-v1.00.ev3b и жмем «Открыть»;

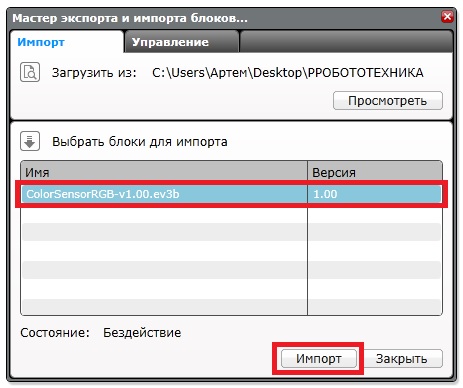
4. В диалоговом окне в таблице «Выбрать блоки для импорта» выбираем ColorSensorRGB-v1.00.ev3b и жмем «Импорт».
5. Для завершения установки закройте диалоговое окно и выйдите из программного обеспечения LEGO MINDSTORMS EV3.
Теперь самый ответственный момент — загрузка программы робота в кирпич:
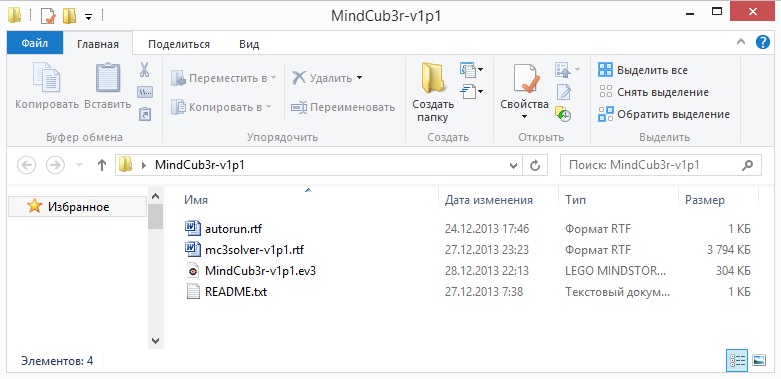
1. Распаковываем предварительно загруженный архив MindCub3r-v1p1a.zip;
2. Запускаем ПО LEGO MINDSTORMS EV3;
3. Выбираем Файл — Открыть проект, ищем файл MindCub3r-v1p1.ev3, распакованный из архива MindCub3r-v1p1.zip и жмем «Открыть»;
4. После открытия проекта загружаем его в «кирпич». Загружаем, но НЕ ЗАПУСКАЕМ.

5. Идем в Инструменты — Обозреватель памяти (Ctrl+I);

6. Выбираем (выделяем) во вкладке «Модуль» или «SD-карта» папку проекта «MindCub3r-v1p1»;
7. Нажимаем «Загрузить»;
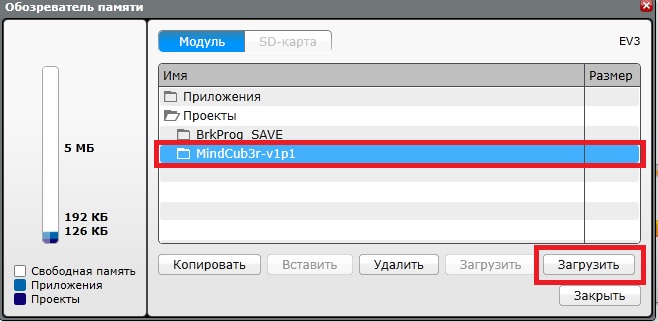
8. Находим файл mc3solver-v1p1.rtf, распакованный из архива MindCub3r-v1p1a.zip и нажимаем «Открыть»;
9. Еще раз нажимаем «Загрузить», предварительно убедившись, что папка проекта «MindCub3r-v1p1» все еще выделена;
10. Находим файл InstallMC3-v1p1.rbf, распакованный из архива MindCub3r-v1p1a.zip и нажимаем «Открыть»;
Примечание: файл mc3solver-v1p1.rtf имеет текстовое расширение .rtf. Пожалуйста, не пытайтесь открыть этот файл с помощью текстового редактора.
11. Закройте диалоговое окно, выйдите из программы и перезагрузите модуль.
Последний этап — устанавливаем приложение MC3 Solver на главном модуле:
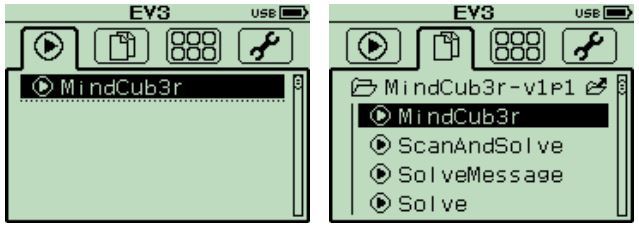
1. Включаем блок:
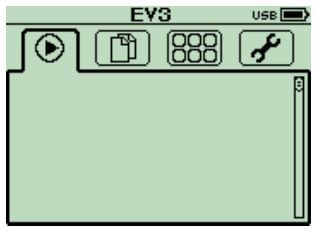
2. Находим во второй вкладке папку проекта MindCub3r-v1p1 (в памяти блока или на SD-карте):

3. Выбираем файл InstallMC3-v1p1 и нажимаем на центральную кнопку модуля для установки:
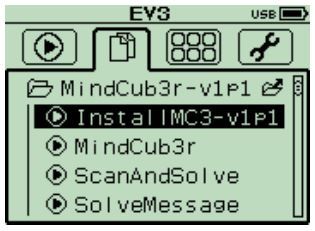
4. В третьей вкладке проверяем наличие установленного приложения MC3 Solver v1p1:

5. Перезагружаем блок.
6. В третьей вкладке блока запускаем приложение «MC3 Solver v1p1» для начала работы программы mc3solver-v1p1.rtf:
Всё! MindCub3r готов к использованию!
7. Запускаем программу в первой или во второй вкладке блока:
После запуска программы робот попросит вложить кубик («Insert cube») и начнет его сканировать датчиком цвета.
После сканирования робот ненадолго задумается и начнет сборку.
Удачное решение задачи ознаменуется радостным вращением кубика.
Вот, собственно, процесс работы робота:
Выше описан идеальный сценарий, на практике же все немного хуже — датчик может не правильно определить цвета — всего робот может провести 3 (три) цикла сканирования до того, как выдаст ошибку (Scan error). После этого нужно изъять кубик и снова вложить в робота. Причиной этому может быть или низкий заряд батареи модуля или «неправильный» кубик.
У меня иногда проходило по 3-5 повторов (3 цикла сканирования и одно изъятие) прежде чем робот принимался за сборку, но результат того однозначно стоит.
Если у вас остались вопросы, задавайте их в комментариях к статье, с удовольствием на них отвечу.