Ювелирное обозрение
Все о ювелирных украшениях, драгоценных камнях и металлах
Квадрокоптер с камерой сделать своими руками
Содержание
- 1 Варианты
- 2 Инструкция по сборке квадрокоптера своими руками (для начинающих)
- 3 Пошаговая инструкция по сборке
- 4 Заключение
- 5 Рецепт сборки квадрокоптера своими руками
- 6 Квадрокоптер с камерой своими руками: видео процесса сборки
- 7 Как подключить электронику всего квадрокоптера
- 8 Рецепт сборки квадрокоптера своими руками
- 9 Квадрокоптер с камерой своими руками: видео процесса сборки
- 10 Как подключить электронику всего квадрокоптера
Привет! Сегодня на повестке дня у нас очень интересная тема. Думаю, ты уже задумывался о том, что можно собрать квадрокоптер своими руками. Идея и правда интересная. Выбирая этот, не самый простой путь, ты не только получишь хороший дрон, но и сможешь понять его устройство, и получишь много полезных знаний. А часть этих знаний ты впитаешь уже сегодня. Поехали!
Варианты
Перед началом стоит вспомнить – а какие же есть способы получить свой квадрокоптер? На самом деле их пять.

RTF (ready to fly) – Просто купить готовый коптер. Тебе останется его просто достать из коробки и запустить в полёт. Это хороший вариант, если тебе не интересны эти конструкторы, и ты хочешь просто удовлетворить свою потребность в БПЛА. Однако, это далеко не так весело, как оставшиеся варианты.
Комплект «всё включено»
Такой комплект подойдёт тем, кто хочет сделать дрон своими руками, но не собирается часами разбираться в документациях, калькуляторах и прочих тонкостях. Там всё так-же рассчитано производителем и подогнано. Нужно только собрать и настроить. Если ты сейчас выбираешь свой первый квадрокоптер, то это определённо твой выбор.
Комплект ARF

ARF (Almost Ready to Fly) – Тут всё слегка сложнее. Бывают разные степени «готовности». Где-то нужно докупить контроллер, а где-то в комплекте идёт только рама коптера. Собрать квадрокоптер, настроить и откалибровать придётся самому. Вариант для тех, кто хочет углубиться в тему и поковыряться в своём БПЛА.
С нуля
Это выбор продвинутых юзеров. Строить коптер с нуля — значит самостоятельно подбирать оптимальные компоненты, разрабатывать и изготавливать раму и так далее. Это сложный, но очень интересный путь, особенно, если не брать готовый модуль управления, а попытаться использовать Arduino или raspberry pi.
Из подручных материалов

Мы не ищем лёгких путей. Дедушкин гараж, алиэкспресс и помойка электроники – наш выбор. Путь боли, ПВХ труб и хардкора, но в результате ты получишь полностью самодельный квадрокоптер. Тут полный простор для фантазии, а все необходимые комплектующие и чертежи квадрокоптеров можно найти в интернете.
Инструкция по сборке квадрокоптера своими руками (для начинающих)

А теперь давай разберёмся с тем, как собрать квадрокоптер мечты. Сразу скажу, что это обобщённый гайд, и некоторые моменты могут отличаться. Я попытаюсь систематизировать процесс, и указать на основные моменты выбора и сборки.
Детали для сборки квадрокоптера.
Сборка квадрокоптера своими руками начинается с выбора компонентов. Это самый ответственный этап.
Комплектующие рамы

Несущая конструкция коптера крайне важна. От её характеристик зависит то, сколько лишней мощности у вас останется. Чем легче рама, тем она дороже. На счёт прочности особо напрягаться не стоит, если в ваши планы не входит постройка квадрокоптера для массивных камер. Есть три основных типа рамы – четырёхлучевая, шестилучевая и восьмилучевая. В данном случае мы будем отталкиваться от четырёхлучевой компоновки с одинарными двигателями (один движок на луч).
Также рама может быть оснащена складными лучами, но это уже очень дорого, и не очень нужно. Можно попробовать реализовать это самостоятельно.
Особенности при выборе компонентов
Моторы

Моторы советую брать чуть помощнее, чем нужно. Во-первых, если ты берёшь их в Китае, то их характеристики будут завышены. Во-вторых, это даст тебе больше простора. К примеру, если нужно будет повесить камеру потяжелее, или какой-либо другой модуль, то это не повредит лётным характеристикам.
Пропеллеры
Это тема достаточно объёмная. При выборе винтов нужно ориентироваться на свои потребности. Если это будет простенький коптер для «полетать», то можно смело брать пластиковые. Если же вы хотите настоящий рабочий агрегат для аэрофотосъёмки, или спортивный мини дрон (что не парадоксально, ибо там каждый грамм на счету) то желательно использовать композитные материалы. Ну и не жадничай. Переплата в 10 процентов может избавить от необходимости балансировки.
Пульт и приёмник

Для начала, грамотным решением будет взять пульт, у которого в комплекте есть приёмник. Тогда они будут уже спарены, и тебе останется только присоединить приёмник к управляющей плате. Пульт тоже не бери бездумно. Обычно, приличные экземпляры с большим радиусом действия начинаются от 1 000 рублей. Многие имеют кучу функций, которыми пользоваться будет невозможно. К примеру переключатели режимов есть, а плата режимов полёта и не поддерживает. Из-за этого вес и объём занимают бесполезные переключатели.
Регуляторы оборотов
Они характеризуются по мощности, виткам мотора, внутреннему сопротивлению, наличию реверса, точности работы и куче других страшных параметров. Если есть возможность – ищи комплект двигателей с контроллерами. Если так ты не хочешь, то придётся курить форумы и документацию. В принципе, если согласовать допустимый тип моторов и выдаваемую мощность, то шанс промахнуться минимален, но я этого не говорил. Перепроверь.
Батарея

Необходимая батарея рассчитывается при помощи калькулятора. Он учитывает много параметров, включая вес самого батарейного блока. Дешёвки снова не советую брать. Горит красиво, но слишком быстро. Если коптер – грузовой, и оснащён мощными моторами и прочим навесным оборудованием с высоким потреблением энергии, то не забудь проверить, хватит ли мощности аккумуляторов.
Камера
Ух, вот это самая жесть. Камера не всегда нужна, но если она нужна, то нужно внимательно подойти к её выбору. В качестве записывающей камеры стоит использовать экшн камеры- GoPro или её Китайские аналоги (они не сильно уступают в качестве видео, если даже не превосходят «фирму»). Нужно ориентироваться на вес, и на угол обзора. С весом всё понятно, а вот про угол расскажу.

Хочется, чтобы камера снимала красоты мира, но не снимала лучи коптера. Если ты промахнулся и это произошло, то придётся выбрать из двух плохих вариантов.
Опустить камеру так, чтоб она не задевала пропеллеры. Опускать, скорее всего, придётся сильно, и это вызовет массу проблем с взлётом и посадкой, а также с маневренностью, из-за смещённого центра тяжести.
Вынести камеру вперёд. Тоже беда. Снова сместится центр тяжести (в этом случае можно попытаться уравновесить при помощи АКБ). Ещё сильнее утяжелит конструкцию, ибо придётся придумывать очень мощный фиксатор. Иначе никакими бюджетными виброгасителями делу не поможешь, и эффект желе обеспечен.
Можно попробовать использовать ориентировочную формулу L= 2 * tg (A /2) х D, где:
- L — Область обзора камеры на расстоянии D
- Α — Угол обзора камеры
- D – расстояние до объекта (в нашем случае, до пропеллеров)
Ты получишь диаметр круга, но так как камера снимает прямоугольное изображение, то этот диаметр будет диагональю. Там уж можно примерно прикинуть- задевает, или нет.
Компоненты выбираем, руководствуясь необходимым результатом. Не нужно брать самое лучшее, если в этом нет необходимости. Возможности своей сборки ты можешь приблизительно рассчитать при помощи калькулятора.
Китайские детали
Сразу говорю – в Китае брать можно, но стоит намного серьёзнее подойти к вопросу. Китайцы постоянно завышают характеристики. Так что, нужно примерно понимать, как и что работает, и не вестись на россказни Китайца о небывалых параметрах и чудесном качестве. Короче говоря – можно, но с пониманием дела и на свой страх и риск.
Контроллер
Контроллер, это мозг твоего мультикоптера. Их можно разделить на два вида.

Универсальный: Например, DJI NAZA. Такой контроллер можно использовать с абсолютно любой сборкой. Будь то квадрокоптер, гексакоптер или октокоптер. Он не заточен под управление чем-то конкретным. На него можно подвесить кучу оборудования, он обладает многими функциями и датчиками.
Есть и минусы. Первый минус, это цена. Тот же DJI Naza-M V2 стоит 17 000 рублей. Второй минус- необходимость настройки. Для этого используется специальная программа, написанная под конкретный контроллер. Там можно заменить и отрегулировать практически всё, но это требует определённых сил, знаний и времени.
Специализированный: Как в последующем примере. Он уже заточен под работу с конкретной компоновкой коптера. Конечно, он даёт некоторый простор, но мощность на каждом двигателе вы не настроите. Стоит недорого, умеет мало. Самое то, для начала.
Пошаговая инструкция по сборке
Давайте условимся на том, что ты прочитал нашу статью про выбор набора для сборки квадрокоптера ,и воспользовался ценнейшем советом – брать раму с платой распределения. Если нет, то провода подключаем сразу к модулю управления.

Для примера рассмотрим сборку из следующих комплектующих:
- Каркас квадрокоптера Diatone Q450 Quad 450 V3 PCB Quadcopter Frame Kit 450mm
- Мотор DYS D2822-14 1450KV Brushless Motor. 4 штуки
- Регулятор DYS 30A 2-4S Brushless Speed Controller ESC Simonk Firmware
- Пропеллеры DYS E-Prop 8×6 8060 SF ABS Slow Fly Propeller Blade For RC Airplane
- Модуль управления квадрокоптером KK2.1.5 kk21evo
- Аккумуляторная батарея литий-полимерного типа Turnigy nano-tech 2200mah 4S
90C Lipo Pack
Размазываем компоненты по столу ровным слоем, и начинаем.
Этап первый. Сборка

- Примерно прикидываешь необходимую длину проводов контроллера, прибавляешь небольшой запас «на криворукость» и обрезаешь их до нужной длины
- Припаиваешь коннекторы к выходам регуляторов, чтобы потом проще было подключать моторы
- Припаиваешь регуляторы к плате разводки
- Припаиваешь коннектор аккумуляторного блока к плате разводки
- Прикручиваешь двигатели на лучи коптера. При установке моторов постарайся не сорвать резьбу
- Если коннекторов на двигателях нет, то припаиваешь и их
- Привинчиваешь лучи с двигателями к плате
- Крепишь регуляторы к лучам дрона. Не важно чем, но удобнее всего пластиковыми хомутами
- Подключаем провода регуляторов к двигателям в произвольном порядке. Если будет нужно – потом изменим
- Закрепляешь на корпусе модуль управления (предварительно сфотографировав тыльную часть. Пригодится). Снова хоть на жвачку, но советую пока использовать мягкий двухсторонний скотч
- Подключаешь регуляторы оборотов к контроллеру. В те порты, которые отмечены (+ — пусто), обычно подключается белым проводом к экрану
- Остатками скотча закрепляешь приёмник как можно ближе к блоку управления, и подключаешь нужные каналы к нужным портам. Используй документацию своего приёмника и фото тыльной стороны платы, чтобы разобраться какая пачка проводов за что отвечает
- Подключишь питание устройства от батареи, через коннектор
- Profit! Ты собрал свой квадрокоптер
Этап второй. Отладка

- Запускаешь двигатели (тут обычно всё по-разному, так что снова смотри документацию)
- Немного прибавляешь газ, и смотришь в какую сторону вращаются пропеллеры. Они должны вращаться так, как указано в схеме, которая прилагается к контроллеру. Иначе управление будет инвертироваться. Если что-то не так, то просто переворачиваешь коннектор, который соединяет двигатель и контроллер
- Когда всё вращается правильно – прикручиваешь верхнюю деталь рамы. Не заталкивай её на своё место. Если она встаёт туго, значит что-то пошло не так. Ослабь нижние винтики, а после установки затяни всё равномерно
- Закрепляешь блок с аккумуляторами
- Монтируешь адаптеры для пропеллеров на моторы
- Устанавливаешь пропеллеры, учитывая направление вращения моторов. Приподнятая часть лопасти должна смотреть в направлении вращения
- Готово.Твой коптер готов пережить первое включение!
Это был один из простейших примеров, с которого стоит начать. Конечно, если ты хочешь использовать камеру, GPS или более сложный контроллер, то конструкция будет сложнее. Поэтому, если вы не уверены в своих силах, то стоит начать с малого. Всё остальное можно прикрутить потом.
Однако, не стоит переоценивать сложность самоделки. Если нет цели собрать мультикоптер из ПВХ труб на базе ардуино (а такое тоже бывает), то в этом нет ничего, что не смог бы рядовой пользователь. Главное не теряться, читать и спрашивать, если что-то не понятно.
Заключение
Напоследок хочется внести в этот текст немного морали. Любое подобное занятие, будь то проектирование, или просто сборка – является мощнейшим образовательным инструментом. Главное, это просто начать. Ты начнёшь понимать многие тонкости, и научишься концентрировать внимание на важных моментах. Это относится не только к сборке коптеров.
Тебе придётся научиться искать информацию, гуглить, и разбираться в массе вещей. Они тебе не пригодятся в жизни, но ими ты не слабо прокачаешь интеллект. Дерзай, учись, развивайся, и не бойся экспериментировать!
Кстати, расскажи в комментах о том, что ты думаешь об этой теме. Также можешь подписаться на наши группы (кнопки внизу). Тебе не сложно — мне приятно. Удачи, пилот, и да прибудет с тобой подъёмная сила.
Для того чтобы собрать квадрокоптер с камерой своими руками, нужно разделить сборку на два этапа. Первый этап это сборка самого квадрокоптера. Второй – подключение к нему камеры.
Итак, первый этап.
Рецепт сборки квадрокоптера своими руками
Для сборки квадрокоптера нам понадобятся следующее:
- четыре двигателя для квадрокоптера;
- четыре регулятора оборотов;
- четыре воздушных винта (пропеллера), можно с запасом;
- силовой разветвитель 3,5 мм;
- настраиваемая плата через usb для управления квадрокоптером;
- четыре аккумулятора или более, чтобы получить максимум удовольствия от полета;
- зарядное устройство для подзарядки аккумуляторов;
- устройство радиоуправления квадрокоптером (продается вместе с приемником и передатчиком);
- дополнительные платы для соединения приемника с “мозгами” квадрокоптера;
- провода в силиконовой оболочке для моторов, по две штуки красного и черного;
Это все что касается механизмов и управления.
Рама для квадрокоптера своими руками
Чтобы наш квадрокоптер чувствовал себя уверенно в полете, его нужно снабдить неким скелетом, на котором будут держаться все механизмы управления. Существует два подхода к решению этой задачи:
- готовая рама для квадрокоптера;
- рама собранная своими руками;

Чтобы выбрать наиболее подходящий вариант для Вас, нужно понимать некоторые нюансы. Если приобрести готовую раму, то как правило на нее уже можно все прикрутить и можно запускать в полет. Но если, какая-нибудь деталь будет повреждена при падении или неаккуратном использовании, ожидание этой детали займет некоторое время, пока она будет доставлена курьерскими службами на ваш адрес.
Что касается сборной рамы своими руками из подручных средств, то в этом случае нужно будет повозиться, чтобы все ровно вырезать и прикрепить. В случае каких-либо казусов, поломанную деталь можно будет легко заменить.
Самым распространенным вариантом для изготовления рамы из подручных средств, являются пластиковые трубы, которые применяют при строительстве для проводки проводов. Их свойства идеально подходят для крепления всех необходимых элементов управления, двигателей. Чтобы их прикрутить (двигатели), можно использовать крепления, те что используют для крепления труб к стенам при проводке проводов.
С помощью таких труб получается довольно-таки хорошая конструкция, на которой надежно можно закрепить все детали квадрокоптера и и камеру. Итак, у нас почти готов квадрокоптер с камерой своими руками, осталось все это правильно собрать и отправиться на испытательные полеты.
Квадрокоптер с камерой своими руками: видео процесса сборки
Весь процесс по сборке квадрокоптера своими руками представлен в этом видео. Смотрим.
Ниже представлены фото, которые я нашел в интернете. На них представлены квадрокоптеры с камерой, которые были собраны своими руками из подручных средств.
Как подключить электронику всего квадрокоптера
Русифицированную инструкцию мне найти не удалось, спасибо моему другу который перевел с английского на русский эту инструкцию для вас.
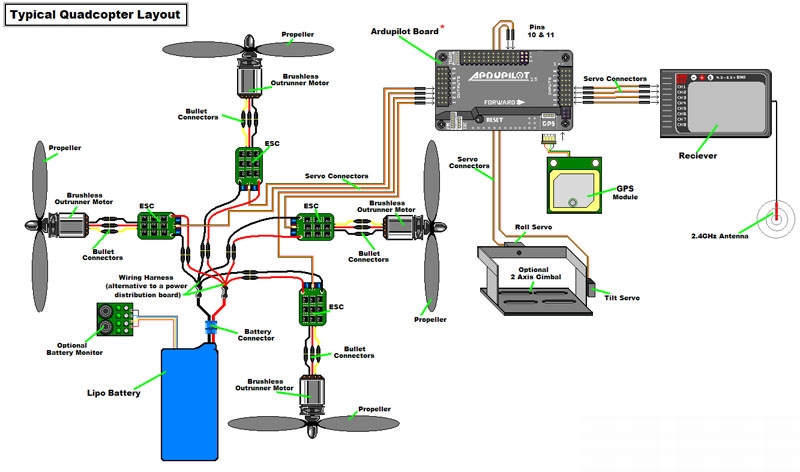
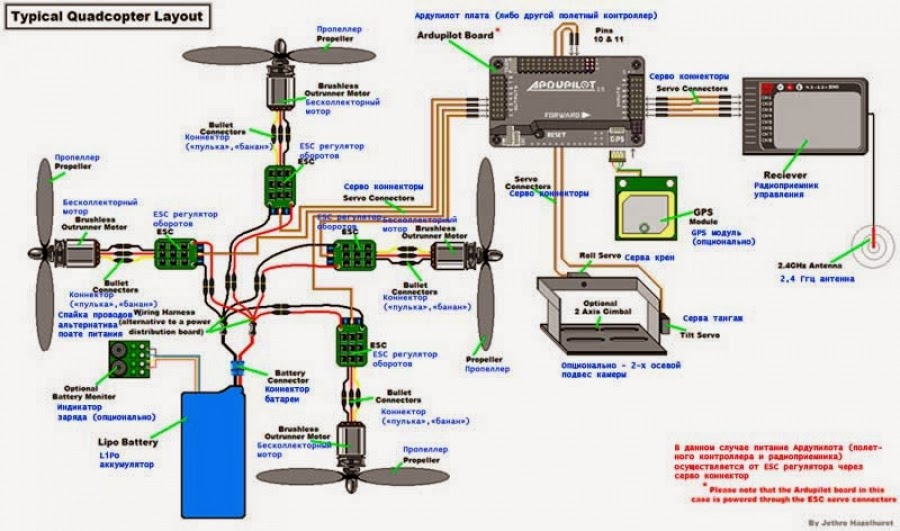
При подключении моторов, придется продлить провода, методом наращивания. Можно использовать любые подходящие провода, но желательно “силиконовые”. Это позволит им не трескаться при низкой температуре, если вы вдруг захотите запечатлеть на видео новогодний салют зимой.
Настроить и “обучить” квадрокоптер с помощью ПО
Итак мы собрали квадрокоптер с камерой своими руками, осталось обучить нашу машину правильно вести себя в полете. Для этого нужно ее “обучить”. Как это делается? Очень просто! Нужно загрузить прошивку на плату через usb. Найти эту прошивку можно на специализированном форуме или на нашем сайте. Когда выйдет статья с прошивкой, тут появится кликабельная ссылка на прошивку.
Если вы еще не умеете летать на квадрокоптере и хотите научиться, то специально для вас я напишу статью на эту тему. Ссылка появится здесь. Там я расскажу об особенностях управления квадрокоптером и на каком быстрее всего научиться летать как профессионал.
Что же касается второго этапа, то тут все просто нужно прикрепить камеру, которую вы сочтете подходящей для себя по цене и по качеству. В видео обзорах вы найдете подходящую камеру, если нет, то пишите в чат, что располагается в левом нижнем углу, другие пользователи вам подскажут.
В завершение этой статьи предлагаю вам посмотреть еще одно видео по сборке квадрокоптера с камерой своими руками.
Для того чтобы собрать квадрокоптер с камерой своими руками, нужно разделить сборку на два этапа. Первый этап это сборка самого квадрокоптера. Второй – подключение к нему камеры.
Итак, первый этап.
Рецепт сборки квадрокоптера своими руками
Для сборки квадрокоптера нам понадобятся следующее:
- четыре двигателя для квадрокоптера;
- четыре регулятора оборотов;
- четыре воздушных винта (пропеллера), можно с запасом;
- силовой разветвитель 3,5 мм;
- настраиваемая плата через usb для управления квадрокоптером;
- четыре аккумулятора или более, чтобы получить максимум удовольствия от полета;
- зарядное устройство для подзарядки аккумуляторов;
- устройство радиоуправления квадрокоптером (продается вместе с приемником и передатчиком);
- дополнительные платы для соединения приемника с “мозгами” квадрокоптера;
- провода в силиконовой оболочке для моторов, по две штуки красного и черного;
Это все что касается механизмов и управления.
Рама для квадрокоптера своими руками
Чтобы наш квадрокоптер чувствовал себя уверенно в полете, его нужно снабдить неким скелетом, на котором будут держаться все механизмы управления. Существует два подхода к решению этой задачи:
- готовая рама для квадрокоптера;
- рама собранная своими руками;
Чтобы выбрать наиболее подходящий вариант для Вас, нужно понимать некоторые нюансы. Если приобрести готовую раму, то как правило на нее уже можно все прикрутить и можно запускать в полет. Но если, какая-нибудь деталь будет повреждена при падении или неаккуратном использовании, ожидание этой детали займет некоторое время, пока она будет доставлена курьерскими службами на ваш адрес.
Что касается сборной рамы своими руками из подручных средств, то в этом случае нужно будет повозиться, чтобы все ровно вырезать и прикрепить. В случае каких-либо казусов, поломанную деталь можно будет легко заменить.
Самым распространенным вариантом для изготовления рамы из подручных средств, являются пластиковые трубы, которые применяют при строительстве для проводки проводов. Их свойства идеально подходят для крепления всех необходимых элементов управления, двигателей. Чтобы их прикрутить (двигатели), можно использовать крепления, те что используют для крепления труб к стенам при проводке проводов.
С помощью таких труб получается довольно-таки хорошая конструкция, на которой надежно можно закрепить все детали квадрокоптера и и камеру. Итак, у нас почти готов квадрокоптер с камерой своими руками, осталось все это правильно собрать и отправиться на испытательные полеты.
Квадрокоптер с камерой своими руками: видео процесса сборки
Весь процесс по сборке квадрокоптера своими руками представлен в этом видео. Смотрим.
Ниже представлены фото, которые я нашел в интернете. На них представлены квадрокоптеры с камерой, которые были собраны своими руками из подручных средств.
Как подключить электронику всего квадрокоптера
Русифицированную инструкцию мне найти не удалось, спасибо моему другу который перевел с английского на русский эту инструкцию для вас.
При подключении моторов, придется продлить провода, методом наращивания. Можно использовать любые подходящие провода, но желательно “силиконовые”. Это позволит им не трескаться при низкой температуре, если вы вдруг захотите запечатлеть на видео новогодний салют зимой.
Настроить и “обучить” квадрокоптер с помощью ПО
Итак мы собрали квадрокоптер с камерой своими руками, осталось обучить нашу машину правильно вести себя в полете. Для этого нужно ее “обучить”. Как это делается? Очень просто! Нужно загрузить прошивку на плату через usb. Найти эту прошивку можно на специализированном форуме или на нашем сайте. Когда выйдет статья с прошивкой, тут появится кликабельная ссылка на прошивку.
Если вы еще не умеете летать на квадрокоптере и хотите научиться, то специально для вас я напишу статью на эту тему. Ссылка появится здесь. Там я расскажу об особенностях управления квадрокоптером и на каком быстрее всего научиться летать как профессионал.
Что же касается второго этапа, то тут все просто нужно прикрепить камеру, которую вы сочтете подходящей для себя по цене и по качеству. В видео обзорах вы найдете подходящую камеру, если нет, то пишите в чат, что располагается в левом нижнем углу, другие пользователи вам подскажут.
В завершение этой статьи предлагаю вам посмотреть еще одно видео по сборке квадрокоптера с камерой своими руками.